申请日2019.09.29
公开(公告)日2019.12.03
IPC分类号G06Q10/04; G06Q50/06; G01N33/18
摘要
本发明涉及水体环境检测技术领域,提供一种疑似污水源分析定位方法及系统,集自动巡航、动态监测和即时分析为一体,能够在完成日常巡航和水体数据采集的过程中,通过对水体监测值、采集时间、采集点坐标等数据的实时计算,分析推测疑似污水源的空间位置;可自动巡航的监测方式,规避了固定监测设备在部署成本方面的不足;采用监测点数值变化速率与空间向量结合的计算方法进行疑似污水源推测,取代了依靠声波、激光等设备进行的复杂运算方式,而且便于集成应用;自动化的监测、分析、预警功能,非专业人员也可以正常使用,降低了对专业人员的依赖;可有效提升水环境监测及疑似污水源定位的工作效率,降低生产管理成本。
权利要求书
1.一种疑似污水源分析定位方法,其特征在于,包括:
S1,确定任一采集周期内目标水质监测数据值超标最多的三个采集点,所述三个采集点按照超标量的大小依次为第一采集点、第二采集点和第三采集点;
S2,在所述第一采集点与第二采集点的连线或所述第一采集点与第二采集点的连线的延长线上基于所述三个采集点的坐标值和目标水质监测数据值确定发散点;
S3,由所述第三采集点向所述发散点引出射线,所述射线与目标水域边界的交点即为疑似污水源位置。
2.根据权利要求1所述的疑似污水源分析定位方法,其特征在于,在所述S2中,所述第一采集点与所述第三采集点的距离为L1,所述第二采集点与所述第三采集点的距离为L2;
所述第一采集点与所述第三采集点的目标水质监测数据值的差值为T1,所述第二采集点与所述第三采集点的目标水质监测数据值的差值为T2;
所述第二采集点到所述发散点的距离为L3,所述第一采集点到所述发散点的距离为L4,根据L3/L4确定所述发散点;
其中,L3/L4=(L2*T1)*k/(L1*T2),k为所述目标水质监测数据值对于所述疑似污水源位置的影响因子。
3.根据权利要求2所述的疑似污水源分析定位方法,其特征在于,k的确定过程包括:
假定k=1,确定所述疑似污水源位置;
根据所述疑似污水源位置与实际污水源位置的偏差值对k进行修正,直至所述疑似污水源位置与实际污水源位置重合为止。
4.根据权利要求1所述的疑似污水源分析定位方法,其特征在于,所述S1进一步包括:
S11,在一个采集周期内,按照预设的巡航轨迹和采集规则在目标水域内采集多项水质监测参数;
S12,确定所述多项水质监测参数中平均超标量最高的一项为当前采集周期内的目标水质监测数据;
S13,所述目标水质监测数据包括多个采集点,选取其中超标量最大的三个采集点所对应的目标水质监测数据值确定所述发散点。
5.根据权利要求4所述的疑似污水源分析定位方法,其特征在于,每个采集周期内的所述巡航轨迹和采集规则相同;
所述采集规则包括相邻的所述采集周期的时间间隔和所述巡航轨迹上采集点的数量以及对应的坐标值。
6.根据权利要求1至5中任意一项所述的疑似污水源分析定位方法,其特征在于,在相邻的所述采集周期中,前一所述采集周期内分析得到的所述疑似污水源位置为第一污水源位置;
后一所述采集周期内分析得到的所述疑似污水源位置为第二污水源位置;
取所述第一污水源位置与所述第二污水源位置的中点为最终的所述疑似污水源位置。
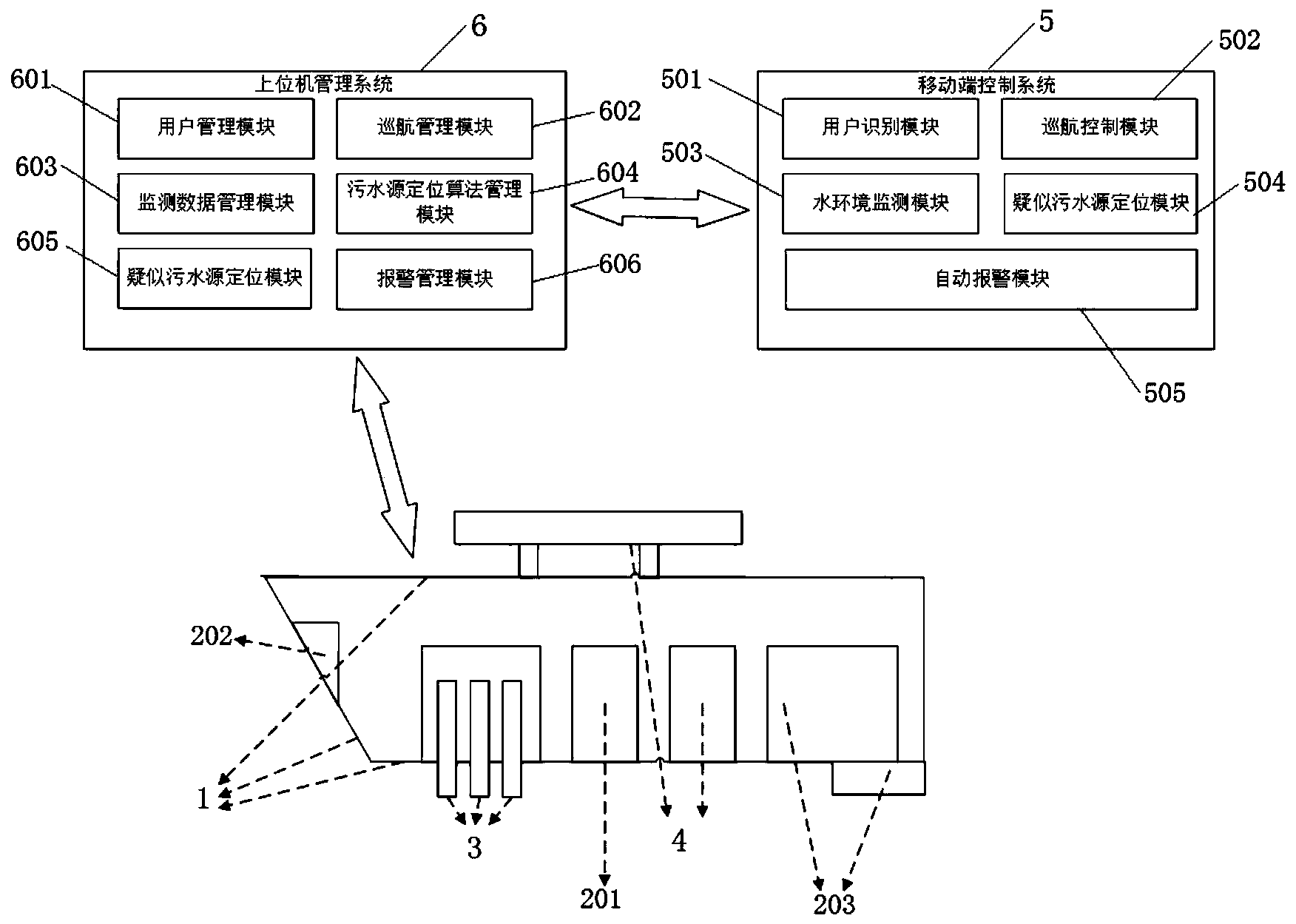
7.一种疑似污水源分析定位系统,其特征在于,包括:上位机管理系统,所述上位机管理系统包括:
监测数据管理模块,用于确定任一采集周期内目标水质监测数据值超标最多的三个采集点,所述三个采集点按照超标量的大小依次为第一采集点、第二采集点和第三采集点;
疑似污水源定位模块,用于在所述第一采集点与第二采集点的连线或所述第一采集点与第二采集点的连线的延长线上基于所述三个采集点的坐标值和目标水质监测数据值确定发散点;由所述第三采集点向所述发散点引出射线,所述射线与水域边界的交点即为疑似污水源位置。
8.根据权利要求7所述的疑似污水源分析定位系统,其特征在于,所述上位机管理系统还包括巡航管理模块,用于设定监测船体的巡航轨迹和采集规则;
所述监测船体上布置有水质数据采集系统和巡航驱动系统,所述水质数据采集系统和巡航驱动系统均与所述上位机管理系统通信连接;
所述巡航驱动系统用于接收所述上位机管理系统的巡航指令,并控制所述监测船体按预设航线在目标水域巡航;
所述水质数据采集系统用于接收所述上位机管理系统的采集指令,并按照预设的采集规则采集水样参数。
9.根据权利要求8所述的疑似污水源分析定位系统,其特征在于,所述巡航驱动系统包括:动力系统、巡航感应系统和定位导航系统;
所述动力系统用于为所述监测船体提供巡航动力;
所述巡航感应系统用于探测所述监测船体行进方向上的障碍物;
所述定位导航系统用于为所述监测船体提供坐标值定位和导航。
10.根据权利要求8所述的疑似污水源分析定位系统,其特征在于,还包括移动端控制系统,所述移动端控制系统与所述上位机管理系统无线通信连接,用于远程操控所述巡航管理模块、监测数据管理模块以及疑似污水源定位模块。
说明书
一种疑似污水源分析定位方法及系统
技术领域
本发明涉及水体环境检测技术领域,更具体地,涉及一种疑似污水源分析定位方法及系统。
背景技术
随着对信息化、自动化技术研究的不断深入,物联网和大数据在各个领域的应用层出不穷,针对水环境监测和检测领域而言,对现代化设备的需求也越来越强烈。众所周知,无论是饮用水、农业用水,还是工业用水,水质监测对整个水环境保护、水污染控制以及维护水环境健康均起着至关重要的作用。因此,对于水环境的有效监测与分析,可为水体污染物分布、污染物溯源、污染途径分析等方面,提供准确的数据基础和及时的预警预报。
目前,对大面积水源的水环境监测主要利用无人船进行巡航监测,可通过上位机系统、遥控器等设备对无人船的运行进行控制,可支持手动模式与自动模式的切换,可支持不同时间间隔对水体传感数据进行采集。
但是,现有的无人船巡航检测仅能对数据进行采集和分析,缺乏对已采集数据的高效利用,对于疑似污水源的预测预警方面存在不足。
发明内容
(一)要解决的技术问题
本发明的目的是提供一种疑似污水源分析定位方法及系统,以解决或部分解决现有水环境检测方式无法对疑似污水源进行分析定位的问题。
(二)技术方案
为了解决上述技术问题,根据本发明实施例的第一方面,提供一种疑似污水源分析定位方法,其特征在于,包括:
S1,确定任一采集周期内目标水质监测数据值超标最多的三个采集点,所述三个采集点按照超标量的大小依次为第一采集点、第二采集点和第三采集点;
S2,在所述第一采集点与第二采集点的连线或所述连线的延长线上基于所述三个采集点的坐标值和目标水质监测数据值确定发散点;
S3,由所述第三采集点向所述发散点引出射线,所述射线与水域边界的交点即为疑似污水源位置。
优选地,在所述S2中,所述第一采集点与所述第三采集点的距离为L1,所述第二采集点与所述第三采集点的距离为L2;
所述第一采集点与所述第三采集点的目标水质监测数据值的差值为T1,所述第二采集点与所述第三采集点的目标水质监测数据值的差值为T2;
所述第二采集点到所述发散点的距离为L3,所述第一采集点到所述发散点的距离为L4,根据L3/L4确定所述发散点;
其中,L3/L4=(L2*T1)*k/(L1*T2),k为所述目标水质监测数据值对于污水源位置的影响因子。
优选地,k的确定过程包括:
假定k=1,确定所述疑似污水源位置;
根据所述疑似污水源位置与实际污水源位置的偏差值对k进行修正,直至所述疑似污水源位置与实际污水源位置重合为止。
优选地,所述S1进一步包括:
S11,在一个采集周期内,按照预设的巡航轨迹和采集规则在目标水域内采集多项水质监测参数;
S12,确定多项水质监测参数中平均超标量最高的一项为当前采集周期内的目标水质监测数据;
S13,所述目标水质监测数据包括多个采集点,选取其中超标量最大的三个采集点所对应的目标水质监测数据值确定所述发散点。
优选地,每个采集周期内的所述巡航轨迹和采集规则相同;
所述采集规则包括相邻的所述采集周期的时间间隔和所述巡航轨迹上各采集点的数量以及对应的坐标值。
优选地,在相邻的所述采集周期中,前一所述采集周期内分析得到的所述疑似污水源位置为第一污水源位置;
后一所述采集周期内分析得到的所述疑似污水源位置为第二污水源位置;
取所述第一污水源位置与所述第二污水源位置的中点为最终的所述疑似污水源位置。
根据本发明实施例的第二方面,提供一种疑似污水源分析定位系统,包括:上位机管理系统,所述上位机管理系统包括:
监测数据管理模块,用于确定任一采集周期内目标水质监测数据值超标最多的三个采集点,所述三个采集点按照超标量的大小依次为第一采集点、第二采集点和第三采集点;
疑似污水源定位模块,用于在所述第一采集点与第二采集点的连线或所述连线的延长线上基于所述三个采集点的坐标值和目标水质监测数据值确定发散点;由所述第三采集点向所述发散点引出射线,所述射线与水域边界的交点即为疑似污水源位置。
优选地,所述上位机管理系统还包括巡航管理模块,用于设定监测船体的巡航轨迹和采集规则;
所述监测船体上布置有水质数据采集系统和巡航驱动系统,所述水质数据采集系统和巡航驱动系统均与所述上位机管理系统通信连接;
所述巡航驱动系统用于接收所述上位机管理系统的巡航指令,并控制所述监测船体按预设航线在目标水域巡航;
所述水质数据采集系统用于接收所述上位机管理系统的采集指令,并按照预设的采集规则采集水样参数。
优选地,所述巡航驱动系统包括:动力系统、巡航感应系统和定位导航系统;
所述动力系统用于为所述监测船体提供巡航动力;
所述巡航感应系统用于探测所述监测船体行进方向上的障碍物;
所述定位导航系统用于为所述监测船体提供坐标值定位和导航。
优选地,所述疑似污水源分析定位系统还包括移动端控制系统,所述移动端控制系统与所述上位机管理系统无线通信连接,用于远程操控所述巡航管理模块、监测数据管理模块以及疑似污水源定位模块。
(三)有益效果
本发明实施例提供的疑似污水源分析定位方法及系统,根据污水源扩散原理,利用超标量最多目标水质监测数据值确定三个采集点,根据三个采集点的坐标值和目标水质监测数据值确定发散点,从而由这三个采集点中超标量最少的一个采集点引出经过该发散点的射线,该射线与水域边界的交点即为疑似污水源位置;并且采集周期越多,其分析预测的疑似污水源位置越准确。(发明人平阳;王一罡;刘新;张倩;王明)

