
申请日2010.02.26
公开(公告)日2010.09.15
IPC分类号G06N3/08; G05B13/02
摘要
本发明公开了一种污水处理曝气节能控制方法,包括以下步骤:01、运行模式选择;11、建立模型;21、学习数据处理;31、神经网络方法学习;41、运行控制。本发明实现工艺处理设备的最优节能控制,并具备工艺参数自我分析、自我诊断及自动处理等自我管理功能;具备很强的自适应能力及鲁棒性,节能效果很好。本发明作为一种污水处理曝气节能控制方法广泛应用于污水处理过程中。
权利要求书
1.污水处理曝气节能控制方法,其特征在于:包括以下步骤:
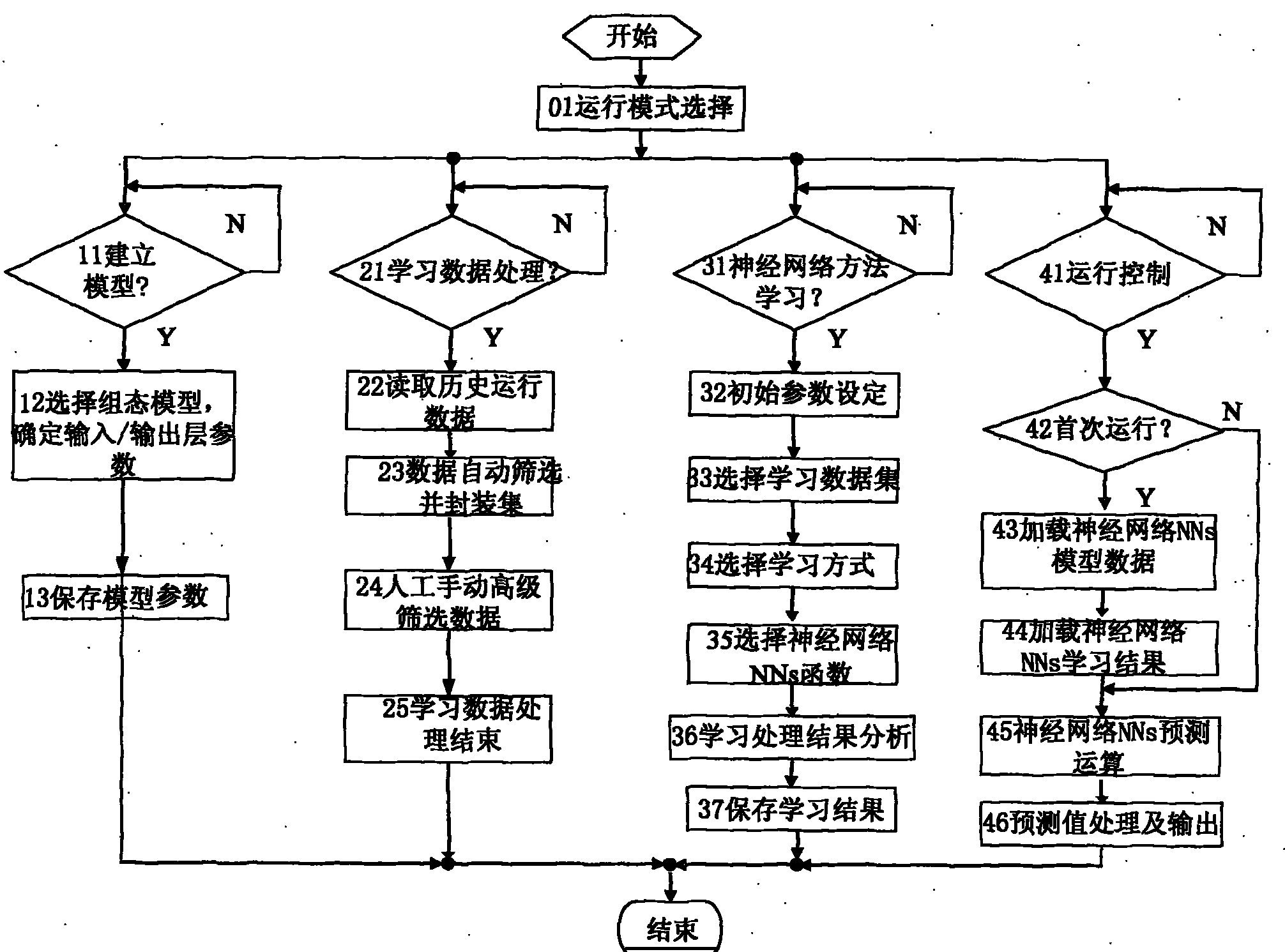
01、运行模式选择;
11、建立模型;
21、学习数据处理;
31、神经网络方法学习;
41、运行控制。
2.根据权利要求1所述的污水处理曝气节能控制方法,其特征在于:所述步骤11包括以下步骤:
11、如果建立模型则执行步骤12,否则返回;
12、选择组态模型,确定输入/输出层参数;
13、保存模型参数。
3.根据权利要求1所述的污水处理曝气节能控制方法,其特征在于:所述步骤21包括以下步骤:
21、如果学习数据处理则执行步骤22,否则返回;
22、读取历史运行数据;
23、数据自动筛选并封装集;
24、人工手动高级筛选数据;
25、学习数据处理结束。
4.根据权利要求1所述的污水 处理曝气节能控制方法,其特征在于:所述步骤31包括以下步骤:
31、如果神经网络方法学习则执行步骤32,否则返回;
32、初始参数设定;
33、选择学习数据集;
34、选择学习方式;
35、选择神经网络NNs函数;
36、学习处理结果分析;
37、保存学习结果。
5.根据权利要求1所述的污水处理曝气节能控制方法,其特征在于:所述步骤41包括以下步骤:
41、如果运行控制则执行步骤42,否则返回;
42、首次运行则执行步骤43,否则执行步骤45;
43、加载神经网络NNs模型数据;
44、加载神经网络NNs学习结果;
45、神经网络NNs预测运算;
46、预测值处理及输出。
6.根据权利要求1所述的污水处理曝气节能控制方法,其特征在于:所述神经网络学习流程包括以下步骤:
81、设定隐层节点数、初始权值、初始阀值、权值调节系数、阀值调节系数、最大学习次数、最小总误差;
82、输入所有学习样本数据,学习次数加1;
83、各节点一般化误差及输出总误差计算;
84、如果当前学习次数t等于设定最大学习次数T且输出总误差E不小于设定最小总误差Er则执行步骤85,如果当前学习次数t不等于设定最大学习次数T且输出总误差E不小于设定最小总误差Er则执行步骤87,如果输出总误差E小于设定最小总误差Er则执行步骤88;
85、输出总误差E减去设定最小总误差Er的差值小于一定数值δ则执行步骤88,否认执行步骤86;
86、对网络进行修正,增大最大学习次数或增大调节系数或增加隐节点数或改变初始权值和阀值大小,执行步骤82;
87、根据权值调节公式、阀值调节公式对权值、阀值调节,执行步骤82;
88、结束。
7.根据权利要求6所述的污水处理曝气节能控制方法,其特征在于:所述最大学习次数T为10000。
8.根据权利要求6所述的污水处理曝气节能控制方法,其特征在于:所述最小总误差Er为0.001。
9.根据权利要求6所述的污水处理曝气节能控制方法,其特征在于:所述步骤81初始权值Wij为-0.3至0.3中的随机数。
10.根据权利要求6所述的污水处理曝气节能控制方法,其特征在于:所述步骤81初始阀值为0.05。
说明书
污水处理曝气节能控制方法
技术领域
本发明涉及一种控制方法,特别是一种污水处理曝气节能控制方法。
背景技术
对污水处理的生化反应过程中,送氧鼓风量与溶解氧和氨的变化关系容易受到污水的浓度、天气、气温、时间变化等环境因素的影响,因而会产生非线性、时变、不确定性、时滞等问题。传统的污水处理过程中鼓风机的送氧量是固定不变的,如果鼓风机送氧量过少则会导致污水处理的生化反应过程不充分,严重影响污水处理的效果;如果鼓风机的送氧量过多,则虽然污水处理的生化反应过程充分,但是鼓风机浪费大量电能量,传统简单的污水处理曝气控制方法不能达到既满足送氧量又节省电能的效果。
发明内容
为了解决上述的技术问题,本发明的目的是提供一种实时监控、会自学习且节能环保的污水处理曝气节能控制方法。
本发明解决其技术问题所采用的技术方案是:
污水处理曝气节能控制方法,包括以下步骤:
01、运行模式选择;
11、建立模型;
21、学习数据处理;
31、神经网络方法学习;
41、运行控制。
进一步,所述步骤11包括以下步骤:
11、如果建立模型则执行步骤12,否则返回;
12、选择组态模型,确定输入/输出层参数;
13、保存模型参数。
进一步,所述步骤21包括以下步骤:
21、如果学习数据处理则执行步骤22,否则返回;
22、读取历史运行数据;
23、数据自动筛选并封装集;
24、人工手动高级筛选数据;
25、学习数据处理结束。
进一步,所述步骤31包括以下步骤:
31、如果神经网络方法学习则执行步骤32,否则返回;
32、初始参数设定;
33、选择学习数据集;
34、选择学习方式;
35、选择神经网络NNs函数;
36、学习处理结果分析;
37、保存学习结果。
进一步,所述步骤41包括以下步骤:
41、如果运行控制则执行步骤42,否则返回;
42、首次运行则执行步骤43,否则执行步骤45;
43、加载神经网络NNs模型数据;
44、加载神经网络NNs学习结果;
45、神经网络NNs预测运算;
46、预测值处理及输出。
进一步,所述神经网络学习流程包括以下步骤:
81、设定隐层节点数、初始权值、初始阀值、权值调节系数、阀值调节系数、最大学习次数、最小总误差;
82、输入所有学习样本数据,学习次数加1;
83、各节点一般化误差及输出总误差计算;
84、如果当前学习次数t等于设定最大学习次数T且输出总误差E不小于设定最小总误差Er则执行步骤85,如果当前学习次数t不等于设定最大学习次数T且输出总误差E不小于设定最小总误差Er则执行步骤87,如果输出总误差E小于设定最小总误差Er则执行步骤88;
85、输出总误差E减去设定最小总误差Er的差值小于一定数值δ则执行步骤88,否认执行步骤86;
86、对网络进行修正,增大最大学习次数或增大调节系数或增加隐节点数或改变初始权值和阀值大小,执行步骤82;
87、根据权值调节公式、阀值调节公式对权值、阀值调节,执行步骤82;
88、结束。
进一步,所述最大学习次数T为10000。
进一步,所述最小总误差Er为0.001。
进一步,所述步骤81初始权值Wij为-0.3至0.3中的随机数。
进一步,所述步骤81初始阀值为0.05。
本发明的有益效果是:本发明实现工艺处理设备的最优节能控制,并具备工艺参数自我分析、自我诊断及自动处理等自我管理功能;具备很强的自适应能力及鲁棒性,节能效果很好





