
°°°°…к«л»’2018.04.25
°°°°єЂњ™(єЂЄж)»’2018.11.20
°°°°IPCЈ÷јаЇ≈G01N1/10; B25J11/00
°°°°’™“™
°°°°±Њ µ”√–¬–ЌєЂњ™ЅЋ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дљбєє∞ьј®їъ∆чЌЈ°ҐњЎ÷∆∆ч°Ґєћґ®±џ°Ґ«∞±џ°Ґ ÷±џ°Ґ“∆ґѓ∆ч°Ґ„™÷б°Ґ»°—щ„∞÷√°ҐЅђљ”±џ°Ґ¬ЁЋ®°Ґ÷І≥≈±џ°Ґїъ∆ч»Ћће£ђїъ∆чЌЈµ„≤њ”лїъ∆ч»Ћћеґ•≤њЌв±н√жѕаЅђљ”£ђњЎ÷∆∆ч∞≤„∞”Џїъ∆чЌЈ’э«∞Јљ„уґЋ£ђєћґ®±џ„у≤а√ж”лїъ∆ч»Ћће„у≤а√ж…ѕґЋѕаЅђљ”£ђ«∞±џґ•≤њ”лєћґ®±џµ„≤њѕаћщЇѕ£ђ‘Џљбєє…ѕ…и”–»°—щ„∞÷√£ђ∆шћеі”љш∆шњЏљш»ліҐ∆ш “£ђ∆шће‘ЏЈв±’µƒњ’∆шƒЏ≤ъ…ъ∆ш—є£ђішґѓїо»ыЇЌїо»ыЄЋѕа≈дЇѕ‘Ћґѓ£ђїо»ыЌ∆ґѓїо»ыЄЋѕт”““∆ґѓ£ђ»їЇуїо»ыЄЋішґѓ“∆ґѓ∞е“∆ґѓ£ђ“∆ґѓ∞еішґѓ…мЋхЄЋѕт”““∆ґѓ£ђ…мЋхЄЋЌ∆ґѓ»°—щ∆чѕтЌв“∆ґѓ£ђ»°—щ∆чґ‘∆дќџЋЃљш––»°—щє§„ч£ђњ…ЄщЊЁЋЃќїµƒЄяґ»љш––µч’ы ÷±џµƒ≥§ґ»£ђ±£÷§»°ЋЃ—щµƒЊЂ»Јґ»°£
°°°°»®јы“™«у й
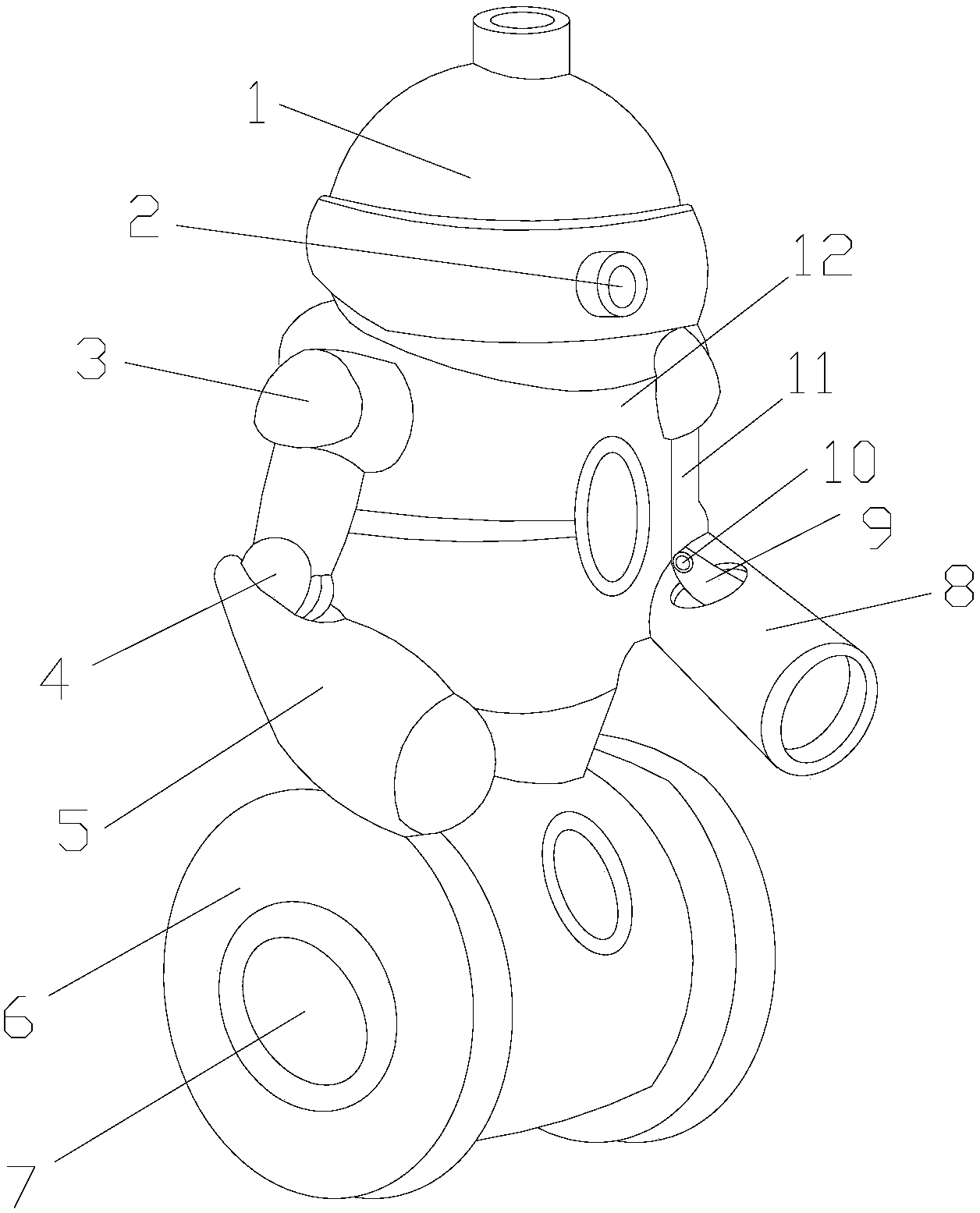
°°°°1.“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дћЎ’ч‘Џ”Џ£Ї∆дљбєє∞ьј®їъ∆чЌЈ(1)°ҐњЎ÷∆∆ч(2)°Ґєћґ®±џ(3)°Ґ«∞±џ(4)°Ґ ÷±џ(5)°Ґ“∆ґѓ∆ч(6)°Ґ„™÷б(7)°Ґ»°—щ„∞÷√(8)°ҐЅђљ”±џ(9)°Ґ¬ЁЋ®(10)°Ґ÷І≥≈±џ(11)°Ґїъ∆ч»Ћће(12)£ђЋщ цїъ∆чЌЈ(1)µ„≤њ”лїъ∆ч»Ћће(12)ґ•≤њЌв±н√жѕаЅђљ”£ђЋщ цњЎ÷∆∆ч(2)∞≤„∞”Џїъ∆чЌЈ(1)’э«∞Јљ„уґЋ£ђЋщ цєћґ®±џ(3)„у≤а√ж”лїъ∆ч»Ћће(12)„у≤а√ж…ѕґЋѕаЅђљ”£ђЋщ ц«∞±џ(4)ґ•≤њ”лєћґ®±џ(3)µ„≤њѕаћщЇѕ£ђЋщ ц ÷±џ(5)ЇуґЋ”л«∞±џ(4)µ„≤њїоґѓЅђљ”£ђЋщ ц“∆ґѓ∆ч(6)ґ•≤њЌв±н√ж”лїъ∆ч»Ћће(12)µ„≤њѕаћщЇѕ£ђЋщ ц„™÷б(7)∞≤„∞”Џ“∆ґѓ∆ч(6)„у≤а√ж÷–ґЋ£ђЋщ ц»°—щ„∞÷√(8)ЇуґЋ”лЅђљ”±џ(9)µ„≤њїоґѓЅђљ”£ђЋщ ц»°—щ„∞÷√(8)∞ьј®љш∆шњЏ(801)°ҐіҐ∆ш “(802)°Ґїо»ы(803)°Ґ√№Јв»¶(804)°Ґїо»ыЄЋ(805)°Ґєћґ®∞е(806)°Ґ“∆ґѓ∞е(807)°ҐЌвњ«(808)°Ґ…мЋхЄЋ(809)°ҐЅђљ”∞е(810)°Ґ»°—щ∆ч(811)£ђЋщ цљш∆шњЏ(801)∞≤„∞”ЏЌвњ«(808)ƒЏ≤аґ•≤њ„уґЋ£ђЋщ ціҐ∆ш “(802)…и”ЏЌвњ«(808)ƒЏ≤а„уґЋ≤Ґ”лљш∆шњЏ(801)µ„≤њѕаЅђљ”£ђЋщ цїо»ы(803)∞≤„∞”ЏіҐ∆ш “(802)”“≤а£ђЋщ ц√№Јв»¶(804)…и”Џїо»ы(803)Ќв±н√жЅљґЋ£ђЋщ цїо»ыЄЋ(805)„у≤а”лїо»ы(803)”“≤аѕаЅђљ”£ђЋщ цєћґ®∞е(806)ќї”Џїо»ыЄЋ(805)’эѕ¬Јљ£ђЋщ ц“∆ґѓ∞е(807)„у≤а”лїо»ыЄЋ(805)”“≤аѕаЅђљ”£ђЋщ ц…мЋхЄЋ(809)∞≤„∞”ЏЌвњ«(808)ƒЏ≤а”“≤а≤Ґ”л“∆ґѓ∞е(807)”“≤аѕаћщЇѕ£ђЋщ ц»°—щ∆ч(811)…и”ЏЌвњ«(808)ƒЏ≤а”“ґЋ≤Ґ”л…мЋхЄЋ(809)”“≤аѕаЅђљ”°£
°°°°2.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ ц»°—щ„∞÷√(8)ќ™‘≤÷щћељбєє≤Ґ«“÷±Њґќ™0.1m°£
°°°°3.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ ц¬ЁЋ®(10)∞≤„∞”ЏЅђљ”±џ(9)„у≤а√ж°£
°°°°4.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цЅђљ”±џ(9)ЇуґЋ”л÷І≥≈±џ(11)µ„≤њѕаЅђљ”°£
°°°°5.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цЌвњ«(808)”лЅђљ”±џ(9)µ„≤њѕаћщЇѕ°£
°°°°Ћµ√ч й
°°°°“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ
°°°°ЉЉ хЅм”т
°°°°±Њ µ”√–¬–Ќ «“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ ф”Џїъ∆ч»ЋЅм”т°£
°°°°±≥Њ∞ЉЉ х
°°°°є§“µїъ∆ч»Ћ «√жѕтє§“µЅм”тµƒґаєЎљЏїъ–µ ÷їтґа„‘”…ґ»µƒїъ∆ч„∞÷√£ђЋьƒ№„‘ґѓ÷і––є§„ч£ђ «њњ„‘…нґѓЅ¶ЇЌњЎ÷∆ƒ№Ѕ¶јі µѕ÷Єч÷÷є¶ƒ№µƒ“ї÷÷їъ∆ч£ђЋьњ…“‘љ” №»Ћја÷Єї”£ђ“≤њ…“‘∞і’’‘§ѕ»±а≈≈µƒ≥ћ–т‘Ћ––£ђѕ÷іъµƒє§“µїъ∆ч»Ћїєњ…“‘ЄщЊЁ»Ћє§÷«ƒ№ЉЉ х÷∆ґ®µƒ‘≠‘тЄўЅм––ґѓ°£
°°°°ѕ÷”–ЉЉ хєЂњ™ЅЋ…к«лЇ≈ќ™£ЇCN201510550083.6µƒ“ї÷÷ќџЋЃі¶јн≥Іµƒ»°ЋЃ—щїъ∆ч»Ћїъћеµƒ…ѕґЋ…и”–ќ¬ґ»/ ™ґ»µчљЏ “£ђїъћеµƒѕ¬ґЋ…и”–µзњЎ “£ђїъћеµƒƒЏ≤њµ„≤а…и”– дЋЌіш£ђ дЋЌіш…ѕ…и”– эЄцЈ≈÷√≤џ£ђЈ≈÷√≤џƒЏ…и”–іжЋЃЌ∞£ђіжЋЃЌ∞ƒЏ…и”–ґ•÷щ£ђїъћеµƒЅљƒЏ≤а±Џ…и”–ємµј£ђємµјƒЏїоґѓЅђљ””–ЊнЅ±√≈£ђќ¬ґ»/ ™ґ»µчљЏ “µƒµ„≤њ…и”–∞ў“ґі∞;Ћщ цµƒµзњЎ “µƒ«∞ґЋ÷–≤њ–эљ””–÷чґѓ±џ£ђ÷чґѓ±џµƒ«∞ґЋ–эљ””–і”ґѓ±џ£ђі”ґѓ±џ…ѕ–эљ””–»°ЋЃЌ∞;Ћщ цµƒі”ґѓ±џќ™…мЋх–Ќі”ґѓ±џ;Ћщ цµƒ÷чґѓ±џ°Ґі”ґѓ±џ°ҐЊнЅ±√≈°Ґ дЋЌішµƒњЎ÷∆ѕµЌ≥Њщ…и÷√‘ЏµзњЎ “ƒЏ£ђµЂ «Є√ѕ÷”–ЉЉ х“ї∞г»°—щїъ∆ч»Ћ ÷±џµƒ≥§ґ»ќ™єћґ®љбєє£ђµ±ќџЋЃі¶јн≥ІµƒќџЋЃЋЃќїљѕЄяїтљѕµЌ ±£ђ ÷±џєї≤ї„≈£ђµЉ÷¬»°ЋЃ—щµƒ эЊЁ≤їєїЊЂ»Ј°£
°°°° µ”√–¬–ЌƒЏ»Ё
°°°°’лґ‘ѕ÷”–ЉЉ хіж‘Џµƒ≤ї„г£ђ±Њ µ”√–¬–Ќƒњµƒ «ћбє©“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ“‘љвЊцѕ÷”–µƒ“ї∞г»°—щїъ∆ч»Ћ ÷±џµƒ≥§ґ»ќ™єћґ®љбєє£ђµ±ќџЋЃі¶јн≥ІµƒќџЋЃЋЃќїљѕЄяїтљѕµЌ ±£ђ ÷±џєї≤ї„≈£ђµЉ÷¬»°ЋЃ—щµƒ эЊЁ≤їєїЊЂ»Јµƒќ ћв°£
°°°°ќ™ЅЋ µѕ÷…ѕ цƒњµƒ£ђ±Њ µ”√–¬–Ќ «Ќ®єэ»зѕ¬µƒЉЉ хЈљ∞Єјі µѕ÷£Ї“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ∆дљбєє∞ьј®їъ∆чЌЈ°ҐњЎ÷∆∆ч°Ґєћґ®±џ°Ґ«∞±џ°Ґ ÷±џ°Ґ“∆ґѓ∆ч°Ґ„™÷б°Ґ»°—щ„∞÷√°ҐЅђљ”±џ°Ґ¬ЁЋ®°Ґ÷І≥≈±џ°Ґїъ∆ч»Ћће£ђЋщ цїъ∆чЌЈµ„≤њ”лїъ∆ч»Ћћеґ•≤њЌв±н√жѕаЅђљ”£ђЋщ цњЎ÷∆∆ч∞≤„∞”Џїъ∆чЌЈ’э«∞Јљ„уґЋ£ђЋщ цєћґ®±џ„у≤а√ж”лїъ∆ч»Ћће„у≤а√ж…ѕґЋѕаЅђљ”£ђЋщ ц«∞±џґ•≤њ”лєћґ®±џµ„≤њѕаћщЇѕ£ђЋщ ц ÷±џЇуґЋ”л«∞±џµ„≤њїоґѓЅђљ”£ђЋщ ц“∆ґѓ∆чґ•≤њЌв±н√ж”лїъ∆ч»Ћћеµ„≤њѕаћщЇѕ£ђЋщ ц„™÷б∞≤„∞”Џ“∆ґѓ∆ч„у≤а√ж÷–ґЋ£ђЋщ ц»°—щ„∞÷√ЇуґЋ”лЅђљ”±џµ„≤њїоґѓЅђљ”£ђЋщ цЅђљ”±џЇуґЋ”л÷І≥≈±џµ„≤њѕаЅђљ”£ђЋщ ц»°—щ„∞÷√∞ьј®љш∆шњЏ°ҐіҐ∆ш “°Ґїо»ы°Ґ√№Јв»¶°Ґїо»ыЄЋ°Ґєћґ®∞е°Ґ“∆ґѓ∞е°ҐЌвњ«°Ґ…мЋхЄЋ°ҐЅђљ”∞е°Ґ»°—щ∆ч£ђЋщ цљш∆шњЏ∞≤„∞”ЏЌвњ«ƒЏ≤аґ•≤њ„уґЋ£ђЋщ ціҐ∆ш “…и”ЏЌвњ«ƒЏ≤а„уґЋ≤Ґ”лљш∆шњЏµ„≤њѕаЅђљ”£ђЋщ цїо»ы∞≤„∞”ЏіҐ∆ш “”“≤а£ђЋщ ц√№Јв»¶…и”Џїо»ыЌв±н√жЅљґЋ£ђЋщ цїо»ыЄЋ„у≤а”лїо»ы”“≤аѕаЅђљ”£ђЋщ цєћґ®∞еќї”Џїо»ыЄЋ’эѕ¬Јљ£ђЋщ ц“∆ґѓ∞е„у≤а”лїо»ыЄЋ”“≤аѕаЅђљ”£ђЋщ ц…мЋхЄЋ∞≤„∞”ЏЌвњ«ƒЏ≤а”“≤а≤Ґ”л“∆ґѓ∞е”“≤аѕаћщЇѕ£ђЋщ ц»°—щ∆ч…и”ЏЌвњ«ƒЏ≤а”“ґЋ≤Ґ”л…мЋхЄЋ”“≤аѕаЅђљ”°£
°°°°љш“ї≤љµЎ£ђЋщ ц»°—щ„∞÷√ќ™‘≤÷щћељбєє≤Ґ«“÷±Њґќ™0.1m°£
°°°°љш“ї≤љµЎ£ђЋщ ц¬ЁЋ®∞≤„∞”ЏЅђљ”±џ„у≤а√ж°£
°°°°љш“ї≤љµЎ£ђЋщ цЅђљ”±џЇуґЋ”л÷І≥≈±џµ„≤њѕаЅђљ”°£
°°°°љш“ї≤љµЎ£ђЋщ цЌвњ«”лЅђљ”±џµ„≤њѕаћщЇѕ°£
°°°°љш“ї≤љµЎ£ђЋщ ц„™÷б”…≤ї–вЄ÷÷∆≥… є∆дЊя”–Јј–в„ч”√°£
°°°°љш“ї≤љµЎ£ђЋщ цњЎ÷∆∆чЌв±н√ж”…pvc÷∆≥…°£
°°°°”–“ж–Ієы
°°°°±Њ µ”√–¬–Ќ“ї÷÷ќџЋЃі¶јн≥І„‘ґѓ»°ЋЃ—щїъ∆ч»Ћ£ђ‘Џљбєє…ѕ…и”–»°—щ„∞÷√£ђ∆шћеі”љш∆шњЏљш»ліҐ∆ш “£ђ∆шће‘ЏЈв±’µƒњ’∆шƒЏ≤ъ…ъ∆ш—є£ђішґѓїо»ыЇЌїо»ыЄЋѕа≈дЇѕ‘Ћґѓ£ђїо»ыЌ∆ґѓїо»ыЄЋѕт”““∆ґѓ£ђ»їЇуїо»ыЄЋішґѓ“∆ґѓ∞е“∆ґѓ£ђ“∆ґѓ∞еішґѓ…мЋхЄЋѕт”““∆ґѓ£ђ…мЋхЄЋЌ∆ґѓ»°—щ∆чѕтЌв“∆ґѓ£ђ»°—щ∆чґ‘∆дќџЋЃљш––»°—щє§„ч£ђњ…ЄщЊЁЋЃќїµƒЄяґ»љш––µч’ы ÷±џµƒ≥§ґ»£ђ±£÷§»°ЋЃ—щµƒЊЂ»Јґ»°£





