申请日2016.06.23
公开(公告)日2016.10.12
IPC分类号C02F1/00
摘要
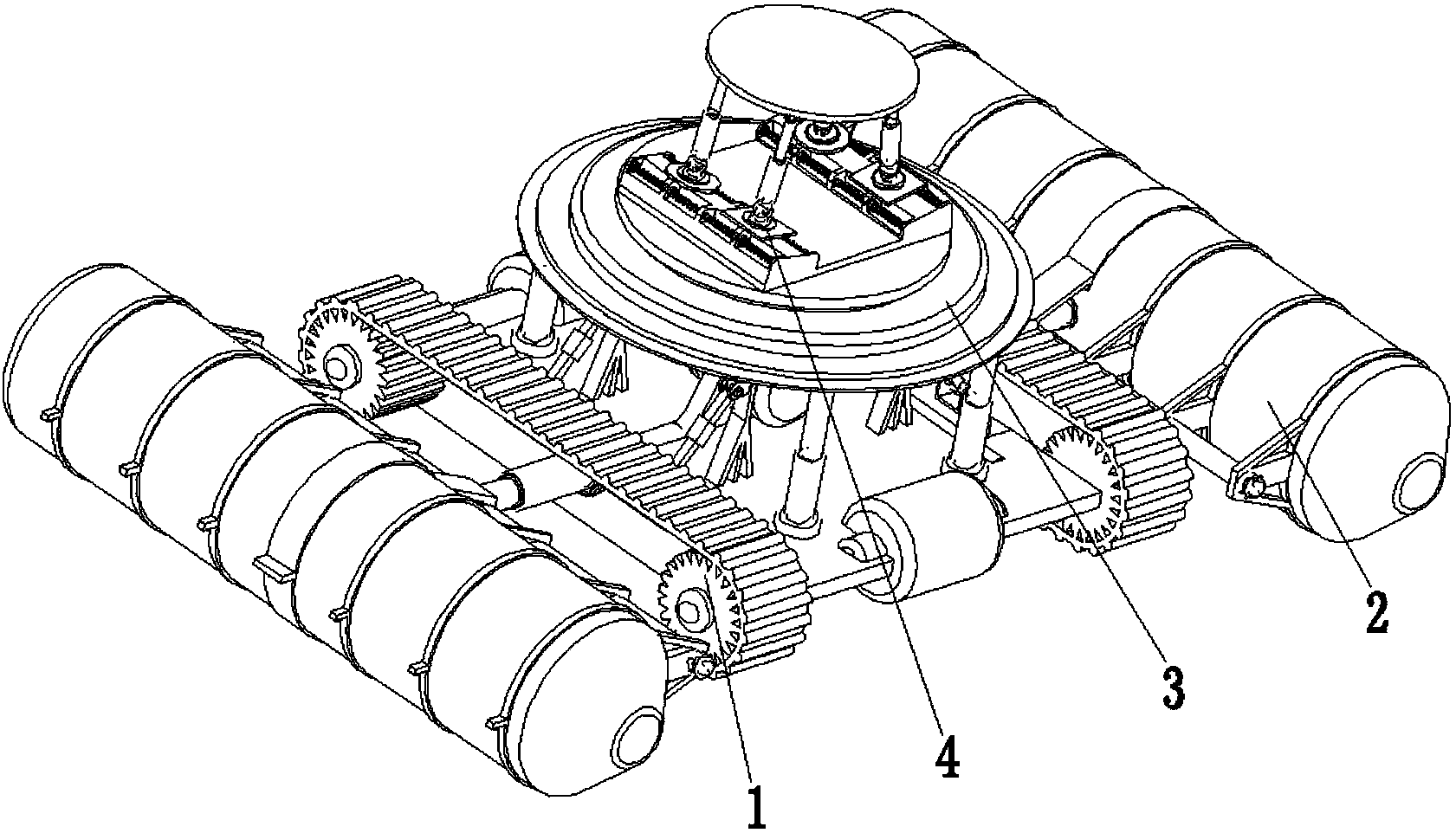
本发明涉及一种湖泊污水净化处理智能机器人专用混联基座,包括陆地行走装置、水面行走装置、升降装置和混联机构;所述的水面行走装置数量为二,且水面行走装置分别位于陆地行走装置的左右两侧,水面行走装置与陆地行走装置相连接,升降装置位于陆地行走装置正上方,且升降装置下端与陆地行走装置上端相连接,混联机构位于升降装置正上方,且混联机构下端与升降装置相连接。本发明具有陆地行走、水面行走和方位角度调节的功能,且行走快速便捷、方位角度调节方便灵活,解决了现有的污水净化投料机器人基座运动灵活性差、适应范围窄和稳定性差的问题。
摘要附图
权利要求书
1.一种湖泊污水净化处理智能机器人专用混联基座,其特征在于:包括陆地行走装置、水面行走装置、升降装置和混联机构;所述的水面行走装置数量为二,且水面行走装置分别位于陆地行走装置的左右两侧,水面行走装置与陆地行走装置相连接,升降装置位于陆地行走装置正上方,且升降装置下端与陆地行走装置上端相连接,混联机构位于升降装置正上方,且混联机构下端与升降装置相连接;其中:
所述的陆地行走装置包括底盘、驱动电机、驱动轴、行走带轮、锁紧扣和行走履带,且驱动电机、锁紧扣和行走履带的数量均为二,驱动轴和行走带轮数量为四;所述的底盘呈矩形结构,底盘左右两侧分别开设有U型槽,底盘前后两端分别开设有安装槽,驱动电机分别固定在底盘前后两侧的安装槽内,且驱动电机采用双轴同步输出电机,驱动轴一端与驱动电机输出轴相连接,驱动轴另一端与行走带轮相连接,且驱动轴与行走带轮之间通过锁紧扣进行固定,行走履带两端分别绕套在行走带轮上,且行走履带外侧均匀设置有半圆形防滑条;
所述的水面行走装置包括行走板、行走铰链、角度调节机构、行走转盘、行走伸缩杆、固定支架、喷气筒、输气管和气压泵;所述的行走板呈条形板状结构,行走板内侧端通过行走铰链与底盘的U型槽内侧壁相连接,角度调节机构数量为二,且角度调节机构沿行走板的横向中心轴线分别对称布置,角度调节机构下端与行走板相固定,行走转盘位于行走板外侧壁中心位置处,行走伸缩杆一端与行走转盘相连接,行走伸缩杆另一端与固定支架相连接,且行走伸缩杆为空心圆柱壳体结构,固定支架后端设置有固定杆,固定支架前端设置有Ω型架,且Ω型架沿固定杆呈直线等间距布置,喷气筒安装在固定支架的Ω型架内,喷气筒前端为圆锥状结构,喷气筒后端开设有喷气口,输气管一端穿过行走伸缩杆与喷气筒相连接,输气管另一端与气压泵相连接,气压泵固定在底盘上端面的中心位置处;
所述的混联机构包括移动底架和四自由度并联机构,移动底架位于四自由度并联机构下方,且移动底架与四自由度并联机构固连;
所述的移动底架包括底板、移动滑轨、滑块、限位弹簧和锁紧柱,且移动滑轨和滑块的数量均为四,限位弹簧数量为十六,锁紧柱的数量为三十二;所述的底板固定在四自由度并联机构上,移动滑轨沿底板的纵向中心轴线分别对称布置,移动滑轨两端分别设置有挡板,滑块安装在移动滑轨上,限位弹簧位于滑块与移动滑轨的挡板之间,且限位弹簧一端通过锁紧柱与移动滑轨的挡板相连接,限位弹簧另一端通过锁紧柱与滑块相连接,且移动滑轨的挡板内侧面和滑块的前后端面上均开设有安装螺纹孔,锁紧柱一端设置有用于固定限位弹簧的锁紧扣,锁紧柱另一端设置有与安装螺纹孔相配合的外螺纹;
所述的四自由度并联机构包括定平台、虎克铰、伸缩杆、球铰链和动平台,且虎克铰、伸缩杆和球铰链的数量均为四;所述的定平台和动平台均为圆盘状结构,且动平台位于定平台正上方,定平台上端部分和动平台下端部分均分别设置有安装螺纹,伸缩杆底端通过虎克铰与滑块相连接,伸缩杆顶端通过球铰链与动平台相连接。
2.根据权利要求1所述的一种湖泊污水净化处理智能机器人专用混联基座,其特征在于:所述的升降装置包括升降推杆、升降圆台和电动转盘;所述的升降推杆数量为四,升降推杆位于升降圆台下方,且升降推杆上端与升降圆台下端面相连接,电动转盘固定在升降圆台上端面中心位置处。
3.根据权利要求1所述的一种湖泊污水净化处理智能机器人专用混联基座,其特征在于:所述的角度调节机构包括调节耳座、第一调节轴、调节拉杆、第二调节轴和调节支架;所述的调节耳座呈U型结构,调节耳座固定在行走板上,调节拉杆下端通过第一调节轴与调节耳座相连接,调节拉杆上端与调节支架之间通过第二调节轴相连接,调节拉杆为电动可伸缩式结构,调节支架呈倒立的Y型结构,调节支架下端固定在底盘上。
说明书
一种湖泊污水净化处理智能机器人专用混联基座
技术领域
本发明涉及污水处理技术领域,具体的说是一种湖泊污水净化处理智能机器人专用混联基座。
背景技术
水污染是由有害化学物质造成水的使用价值降低或丧失,污染环境的水,污水中含有的酸、碱、氧化剂以及铜、镉、汞、砷等化合物和苯、二氯乙烷、乙二醇等有机毒物,会毒死水生生物,影响饮用水源、风景区景观;污水中的有机物被微生物分解时消耗水中的氧,影响水生生物的生命,水中溶解氧耗尽后,有机物进行厌氧分解,产生硫化氢、硫醇等难闻气体,使水质进一步恶化。中国是一个水资源短缺、水灾害频繁的国家,水资源总量居世界第六位,人均占有量只有2500立方米,约为世界人均水量的1/4,在世界排第110位,已被联合国列为13个贫水国家之一;多年来,中国水资源质量不断下降,水环境持续恶化,由于污染所导致的缺水和事故不断发生,不仅使工厂停产、农业减产甚至绝收,而且造成了不良的社会影响和较大的经济损失,严重地威胁了社会的可持续发展,威胁了人类的生存。
目前对于污水治理的方法有物理法、化学法和生物法,其中化学法治理污水就是向污水中投放化学药物,利用化学反应或物理化学作用净化污水,目前对于水库、湖泊、河流、池塘等地的化学法净化污水的方式都是人工乘船向污水中投放化学药物,这样不仅占用了大量的劳动力,投放效率低,而且具有一定的危险性,虽然现在也有少量的自动化设备进行净化投料作业,但是均存在运动灵活性差和调节不方便等问题。鉴于此,本发明提供了一种湖泊污水净化处理智能机器人专用混联基座。
发明内容
为了弥补现有技术的不足,本发明提供了一种湖泊污水净化处理智能机器人专用混联基座。
本发明所要解决其技术问题所采用以下技术方案来实现。
一种湖泊污水净化处理智能机器人专用混联基座,包括陆地行走装置、水面行走装置、 升降装置和混联机构;所述的水面行走装置数量为二,且水面行走装置分别位于陆地行走装置的左右两侧,水面行走装置与陆地行走装置相连接,升降装置位于陆地行走装置正上方,且升降装置下端与陆地行走装置上端相连接,混联机构位于升降装置正上方,且混联机构下端与升降装置相连接。
作为本发明的进一步改进,所述的陆地行走装置包括底盘、驱动电机、驱动轴、行走带轮、锁紧扣和行走履带,且驱动电机、锁紧扣和行走履带的数量均为二,驱动轴和行走带轮数量为四;所述的底盘呈矩形结构,底盘左右两侧分别开设有U型槽,底盘前后两端分别开设有安装槽,驱动电机分别固定在底盘前后两侧的安装槽内,且驱动电机采用双轴同步输出电机,驱动轴一端与驱动电机输出轴相连接,驱动轴另一端与行走带轮相连接,且驱动轴与行走带轮之间通过锁紧扣进行固定,行走履带两端分别绕套在行走带轮上,且行走履带外侧均匀设置有半圆形防滑条;通过驱动电机的转动带动行走带轮的旋转,从而带动行走履带的运动,陆地行走装置主要用于本发明的行走、移动和转向,且陆地行走装置通过采用履带式结构更加便于坑洼地势地况的行走,使得本发明的适用性更强。
作为本发明的进一步改进,所述的水面行走装置包括行走板、行走铰链、角度调节机构、行走转盘、行走伸缩杆、固定支架、喷气筒、输气管和气压泵;所述的行走板呈条形板状结构,行走板内侧端通过行走铰链与底盘的U型槽内侧壁相连接,角度调节机构数量为二,且角度调节机构沿行走板的横向中心轴线分别对称布置,角度调节机构下端与行走板相固定,行走转盘位于行走板外侧壁中心位置处,行走伸缩杆一端与行走转盘相连接,行走伸缩杆另一端与固定支架相连接,且行走伸缩杆为空心圆柱壳体结构,固定支架后端设置有固定杆,固定支架前端设置有Ω型架,且Ω型架沿固定杆呈直线等间距布置,喷气筒安装在固定支架的Ω型架内,喷气筒前端为圆锥状结构,喷气筒后端开设有喷气口,输气管一端穿过行走伸缩杆与喷气筒相连接,输气管另一端与气压泵相连接,气压泵固定在底盘上端面的中心位置处;所述的角度调节机构包括调节耳座、第一调节轴、调节拉杆、第二调节轴和调节支架;所述的调节耳座呈U型结构,调节耳座固定在行走板上,调节拉杆下端通过第一调节轴与调节耳座相连接,调节拉杆上端与调节支架之间通过第二调节轴相连接,调节拉杆为电动可伸缩式结构,调节支架呈倒立的Y型结构,调节支架下端固定在底盘上。通过行走转盘可带动喷气筒在XZ垂直面上的旋转运动,从而调节喷气筒的水面行走倾角,便于本发明在不同流速的水面上的行走移动;通过行走伸缩杆可以带动喷气筒在XY水平面上的左右运动,从而控制喷气筒在水面上行走移动时的伸出长度;通过角度调节机构可以控制行走板以行走铰链为旋转轴进行转动,从而带动喷气筒在YZ垂直面上的旋转,进而调节喷气筒吃水的倾角,即本发 明的吃水量,便于本发明在不同深度的水域中行走移动;通过气压泵可以控制喷气筒喷出气体的流速,从而调节本发明的行进速度;水面行走装置可进行一平移两转动共三自由度的空间运动,其可在不同流速和不同深度的水域中行走移动,且行走速度和吃水量均可调,调节方便快速。
作为本发明的进一步改进,所述的升降装置包括升降推杆、升降圆台和电动转盘;所述的升降推杆数量为四,升降推杆位于升降圆台下方,且升降推杆上端与升降圆台下端面相连接,电动转盘固定在升降圆台上端面中心位置处。
作为本发明的进一步改进,所述的混联机构包括移动底架和四自由度并联机构,移动底架位于四自由度并联机构下方,且移动底架与四自由度并联机构固连;所述的移动底架包括底板、移动滑轨、滑块、限位弹簧和锁紧柱,且移动滑轨和滑块的数量均为四,限位弹簧数量为十六,锁紧柱的数量为三十二;所述的底板固定在四自由度并联机构上,移动滑轨沿底板的纵向中心轴线分别对称布置,移动滑轨两端分别设置有挡板,滑块安装在移动滑轨上,限位弹簧位于滑块与移动滑轨的挡板之间,且限位弹簧一端通过锁紧柱与移动滑轨的挡板相连接,限位弹簧另一端通过锁紧柱与滑块相连接,且移动滑轨的挡板内侧面和滑块的前后端面上均开设有安装螺纹孔,锁紧柱一端设置有用于固定限位弹簧的锁紧扣,锁紧柱另一端设置有与安装螺纹孔相配合的外螺纹;移动底架采用一平移的串联结构,移动底架可进行前后移动,通过移动底架可带动四自由度并联机构的前后移动;所述的四自由度并联机构包括定平台、虎克铰、伸缩杆、球铰链和动平台,且虎克铰、伸缩杆和球铰链的数量均为四;所述的定平台和动平台均为圆盘状结构,且动平台位于定平台正上方,定平台上端部分和动平台下端部分均分别设置有安装螺纹,伸缩杆底端通过虎克铰与滑块相连接,伸缩杆顶端通过球铰链与动平台相连接;四自由度并联机构采用4-UPS形式的并联机构,可实现一平移三转动共四个自由度方向的运动,运动效果好,运动自由度多,结构紧凑且承载能力强;将混联机构应用到本发明中,一方面起到了对本发明投料时整体方位角度调节的作用,使得本发明可以处于各种姿态角度下都可以全方位的进行投料作业,投料方便快捷且投料范围广;另一方面通过混联机构提高了本发明的减震性能,本发明在陆地上或者水中行走时,即使处于颠簸或者非平衡状态下时,本发明始终处于水平平稳状态,防止本发明投料作业时因抖动性或者倾斜性过大导致投料作业无法进行的问题,进一步提高了本发明投料作业时的稳定性和安全性。
与现有技术相比,本发明具有以下优点:
(1)本发明具有陆地行走、水面行走和方位角度调节的功能,且行走快速便捷、方位角 度调节方便灵活,解决了现有的污水净化投料机器人基座运动灵活性差、适应范围窄和稳定性差的问题。
(2)本发明的陆地行走装置和水面行走装置配合转换使用,且转换方便快捷,可适应于陆地行走和水面行走,达到了两栖行走的效果,且水面行走装置可进行一平移两转动共三自由度的空间运动,其可在不同流速和不同深度的水域中行走移动,且行走速度和吃水量均可调,调节方便快速。
(3)本发明的移动底架采用一平移的串联结构,四自由度并联机构采用4-UPS形式的并联机构,可实现一平移三转动共四个自由度方向的运动,运动效果好,运动自由度多,结构紧凑且承载能力强;将混联机构应用到本发明中,一方面起到了对本发明投料时整体方位角度调节的作用,使得本发明可以处于各种姿态角度下都可以全方位的进行投料作业,投料方便快捷且投料范围广;另一方面通过混联机构提高了本发明的减震性能,本发明在陆地上或者水中行走时,即使处于颠簸或者非平衡状态下时,本发明始终处于水平平稳状态,防止本发明投料作业时因抖动性或者倾斜性过大导致投料作业无法进行的问题,进一步提高了本发明投料作业时的稳定性和安全性。

