
申请日2015.06.25
公开(公告)日2015.11.04
IPC分类号C02F11/14
摘要
本发明公开了一种排水管网污泥一体化处理方法,包括污泥挖掘步骤及泥水分离步骤;所述污泥挖掘步骤包括:污泥初步清理步骤、污泥深度清理步骤、过厚污泥清理步骤、大块石头或障碍物的清理步骤,所述泥水分离步骤包括:初次搅拌步骤、再次搅拌步骤、螺旋输送步骤;在初次搅拌步骤和再次搅拌步骤中还包括添加污泥固化剂的步骤。应用本方法可以在施工现场同时实现污泥挖掘和污泥处理,整个过程安全高效、清洁环保,大大提高了作业效率,同时也降低了作业成本和工人的劳动强度。
权利要求书
1.一种排水管网污泥一体化处理方法,其特征在于,包括污泥挖掘步骤及 泥水分离步骤;
所述污泥挖掘步骤包括:污泥初步清理步骤、污泥深度清理步骤、过厚污 泥清理步骤、大块石头或障碍物的清理步骤,
所述泥水分离步骤包括:初次搅拌步骤、再次搅拌步骤、螺旋输送步骤;
在初次搅拌步骤和再次搅拌步骤中还包括添加污泥固化剂的步骤。
2.根据权利要求1所述的一种排水管网污泥一体化处理方法,其特征在于,
其中污泥初步清理步骤:先将排水管网清淤机器人放入箱涵中,操纵地面 控制箱启动电机,操作液压阀组手柄使摆臂油缸缩进,摆臂向下摆动;操作液 压阀组手柄使铲斗油缸缩进,使得铲斗调整到搅拌轴上部,而搅拌轴朝下;操 作液压阀组手柄使得搅拌马达开始工作,搅拌马达带动链轮一,链轮一带动链 轮二使得搅拌轴开始转动,固定安装在搅拌轴上的左旋、右旋叶片转动,叶片 搅散污泥至铲斗下部的管接头,污泥通过管接头再经过软管挤送至污泥泵,污 泥泵将污泥增压并通过污泥管输送至路面;
其中污泥深度清理步骤:完成污泥初步清理步骤后,污泥逐渐被清理直至 搅拌轴的叶片贴近箱涵底部进行污泥深度清理步骤,查看地面控制箱上显示屏 履带倾斜角度,当履带倾斜角接近零度,履带行驶至箱涵底部,进一步缩进摆 臂油缸以及铲斗油缸,使搅拌轴的叶片进一步贴近箱涵底部,同时搅拌轴面向 前方污泥进行清淤作业,进行深层次的进行污泥的清理,减少箱涵底部污泥的 残留;
其中过厚污泥清理步骤:由视频监控判断出污泥厚度过厚时,在完成污泥 初步清理步骤后,操作地面控制箱,使摆臂油缸伸出,摆臂向上摆动,结合视 频监控摆臂摆动使得搅拌轴到合适的高度进行污泥清理;完成上部污泥清理后, 由上往下调整搅拌轴的高度逐步进行污泥清理,循环上述过程直至全部污泥清 理完成;
其中大块石头或障碍物的清理步骤:通过视频监控发现大块石头或障碍物 时,操作地面控制箱上的液压阀组手柄,使摆臂油缸缩进,铲斗油缸伸出,使 铲斗接近大块石头或障碍物的底部,进一步使摆臂油缸伸出,将大块石头或障 碍物铲至铲斗内,再操作履带马达手柄,将机器人开至窨井检查口并采用其他 设备将大块石头或障碍物运送至路面。
3.根据权利要求1所述的一种排水管网污泥一体化处理方法,其特征在于,
其中初次搅拌步骤包括水平搅拌步骤、垂直搅拌步骤和投固化剂步骤,
在挖掘的污泥泵入初步搅拌池中后,同时进行水平搅拌和垂直搅拌,同时 加入污泥固化剂,使污泥实现初步泥水分离,之后进入再次搅拌池中;
其中再次搅拌步骤包括水平搅拌步骤、垂直搅拌步骤和投固化剂步骤,
在再次搅拌池中,同时进行水平搅拌和垂直搅拌,同时加入污泥固化剂, 使污泥实现进一步的泥水分离,之后进入螺旋输送步骤;
其中螺旋输送步骤通过螺旋输送机将固化后的污泥输送至运输车或垃圾 场。
4.根据权利要求3所述的一种排水管网污泥一体化处理方法,其特征在于,
其中在初次搅拌池中投入的污泥固化剂比例低于向再次搅拌池中投入的污 泥固化剂。
说明书
一种排水管网污泥一体化处理方法
技术领域
本发明属于环保技术领域,具体涉及一种排水管网污泥一体化处理方法。
背景技术
每年汛期,由于排水管网污泥淤积影响排水畅通,天下暴雨后,越来越多 的城市都会出现因城市排水管网污泥淤积所致的路面严重积水,严重的甚至导 致该路段的交通中断,严重的影响了人民的生活、生产。因此地下排水管网需 要定期清理,常规圆形排水管道有专用维护设备,箱涵的清淤则普遍采用人工 清淤的方式进行,然而人工清淤需要截流、排水、排气,同时效率低下,最主 要的是不安全。此外,收集到的淤泥往往大量含水,不便于输运和后续处置, 也往往达不到现行环保法规对此所作的相关要求。
发明内容
针对上述问题,本发明提供一种排水管网污泥一体化处理方法,能够实现 污泥挖掘及泥水分离一体化处理,操作人员在地面进行清淤操作,取代人工下 井,提高作业效率,安全可靠;同时在施工现场对收集到的淤泥进行泥水分离、 固化处理。整个淤泥处理过程安全高效、简单可靠,满足相关环保法规。
本发明的技术方案如下:
一种排水管网污泥一体化处理方法,包括污泥挖掘步骤及泥水分离步骤;
所述污泥挖掘步骤包括:污泥初步清理步骤、污泥深度清理步骤、过厚污 泥清理步骤、大块石头或障碍物的清理步骤,
所述泥水分离步骤包括:初次搅拌步骤、再次搅拌步骤、螺旋输送步骤;
其中污泥初步清理步骤:先将排水管网清淤机器人放入箱涵中,操纵地面 控制箱启动电机,操作液压阀组手柄使摆臂油缸缩进,摆臂向下摆动;操作液 压阀组手柄使铲斗油缸缩进,使得铲斗调整到搅拌轴上部,而搅拌轴朝下;操 作液压阀组手柄使得搅拌马达开始工作,搅拌马达带动链轮一,链轮一带动链 轮二使得搅拌轴开始转动,固定安装在搅拌轴上的左旋、右旋叶片转动,叶片 搅散污泥至铲斗下部的管接头,污泥通过管接头再经过软管挤送至污泥泵,污 泥泵将污泥增压并通过污泥管输送至路面。
其中污泥深度清理步骤:完成污泥初步清理步骤后,污泥逐渐被清理直至 搅拌轴的叶片贴近箱涵底部进行污泥深度清理步骤,查看地面控制箱上显示屏 履带倾斜角度,当履带倾斜角接近零度,履带行驶至箱涵底部,进一步缩进摆 臂油缸以及铲斗油缸,使搅拌轴的叶片进一步贴近箱涵底部,同时搅拌轴面向 前方污泥进行清淤作业,进行深层次的进行污泥的清理,减少箱涵底部污泥的 残留;
其中过厚污泥清理步骤:由视频监控判断出污泥厚度过厚时,在完成污泥 初步清理步骤后,操作地面控制箱,使摆臂油缸伸出,摆臂向上摆动,结合视 频监控摆臂摆动使得搅拌轴到合适的高度进行污泥清理;完成上部污泥清理后, 由上往下调整搅拌轴的高度逐步进行污泥清理,循环上述过程直至全部污泥清 理完成;
其中大块石头或障碍物的清理步骤:通过视频监控发现大块石头或障碍物 时,操作地面控制箱上的液压阀组手柄,使摆臂油缸缩进,铲斗油缸伸出,使 铲斗接近大块石头或障碍物的底部,进一步使摆臂油缸伸出,将大块石头或障 碍物铲至铲斗内,再操作履带马达手柄,将机器人开至窨井检查口并采用其他 设备将大块石头或障碍物运送至路面。
其中初次搅拌步骤包括水平搅拌步骤、垂直搅拌步骤和投固化剂步骤,
在挖掘的污泥泵入初步搅拌池中后,同时进行水平搅拌和垂直搅拌,同时 加入污泥固化剂,使污泥实现初步泥水分离,之后进入再次搅拌池中;
其中再次搅拌步骤包括水平搅拌步骤、垂直搅拌步骤和投固化剂步骤,
在再次搅拌池中,同时进行水平搅拌和垂直搅拌,同时加入污泥固化剂, 使污泥实现进一步的泥水分离,之后进入螺旋输送步骤;
其中螺旋输送步骤通过螺旋输送机将固化后的污泥输送至运输车或垃圾 场。
其中在初次搅拌池中投入的污泥固化剂比例低于向再次搅拌池中投入的污 泥固化剂;
其中垂直搅拌通过设置在搅拌池中的四个垂直搅拌总成实现,垂直搅拌的 作用主要是加速污泥与固化剂的混合,使污泥实现固化,水平搅拌通过设置在 搅拌池中的两个水平搅拌总成实现,水平搅拌的作用一方面是搅拌污泥混合固 化剂,另一方面推动污泥往搅拌池卸料口方向移动;
同时设置水平搅拌和垂直搅拌,可以在搅拌池中形成紊流,最大限度的混 合污泥与固化剂,同时避免污泥在池底沉积;
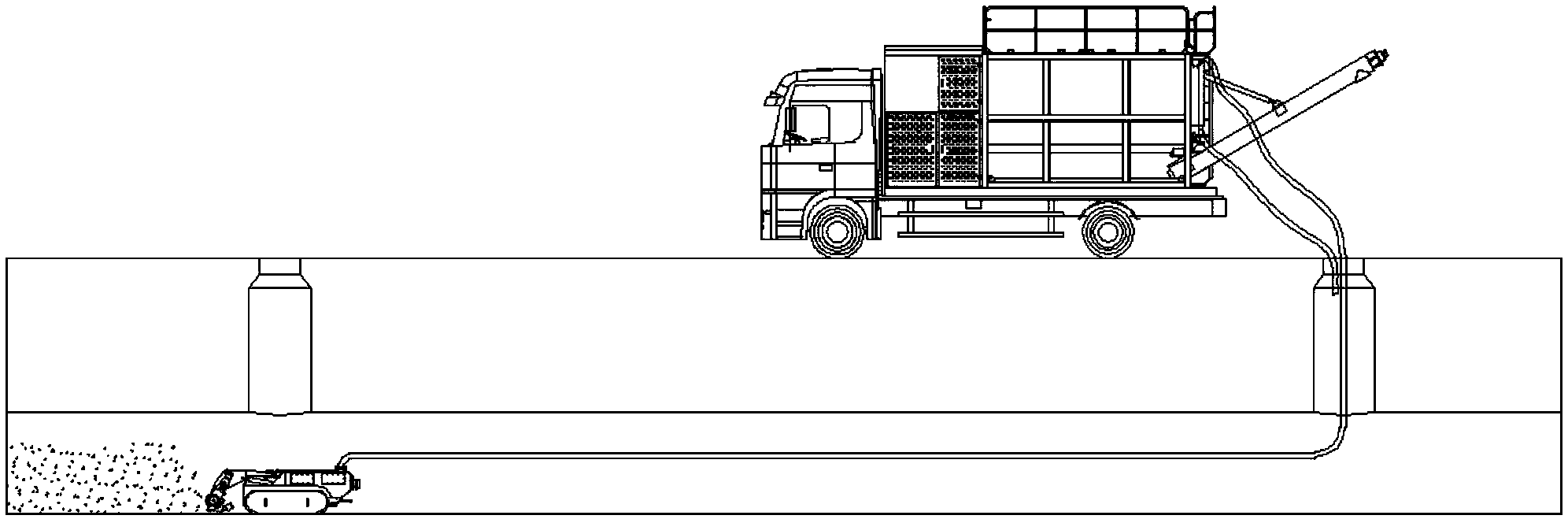
本发明的排水管网污泥处理系统包括两部分,一部分为实现污泥挖掘的履 带清淤机器人,另一部分为实现污泥处理的泥水分离机器人;履带清淤机器人 能够在水下进行清淤工作,只要将其放入箱涵管道内进行污泥清理,操作人员 在地面进行清淤操作,取代人工下井,提高作业效率,安全可靠;泥水分离机 器人则把履带清淤机器人收集到的淤泥进行充分搅拌、固化,进一步通过自身 所带螺旋输送机构输送至在输送机卸料口的专用运输车或垃圾场地。整个淤泥 处理过程安全高效、简单可靠,满足相关环保法规。
履带清淤机器人包括清淤执行组件、淤泥输送组件、腔体、行进组件、地 面控制箱、控制电缆、电控箱、信号反馈组件。清淤执行组件将搅散的淤泥通 过软管挤送至淤泥输送组件的污泥泵中,污泥泵将淤泥增压输送至地面上的泥 水分离机器人,清淤执行组件与腔体为转动副联接,淤泥输送组件安装于腔体 内,行进组件通过螺栓安装在腔体下部,腔体内部还安装有电控箱,电控箱通 过控制电缆与地面控制箱连接以及通讯,信号反馈组件对整个履带清淤机器人 工作环境进行视频监控,采用安装在清淤执行组件、淤泥输送组件、行进组件 内部的传感器和摄像头了解清淤机器人的状况以及工作环境。泥水分离机器人 包括货车底盘、底架、动力及散热系统、泥水分离搅拌总成、液压系统、电气 系统、螺旋输送机构。螺旋输送机构通过铰接安装于泥水分离搅拌总成上,泥 水分离搅拌总成、动力及散热系统、液压系统、电气系统均安装于底架上,底 架再通过螺栓联接安装于货车底盘的大梁上。通过履带清淤机器人挖掘到的淤 泥通过软管输送至地面上泥水分离机器人的泥水搅拌总成中,泥水搅拌总成在 动力系统驱动的液压泵驱动下,带动其自身垂直搅拌马达和水平搅拌马达开始 旋转搅拌,在加入一定比例的固化剂充分搅拌均匀后,淤泥固化再通过卸料口 进入螺旋输送机构的料斗中,通过螺旋输送卸料口卸至专用运输车上。这样整 个过程安全高效、清洁环保。
履带清淤机器人清淤执行组件包括搅拌执行机构、搅拌调整机构、搅拌动 力端;其中,搅拌执行机构包括搅拌马达、搅拌轴、铲斗,搅拌马达输出端装 有链轮,搅拌轴的右端装有链轮,搅拌马达通过链条与搅拌轴连接,搅拌马达 转动,带动搅拌轴转动,由于在水下作业,链轮、链条安装有保护罩,防止异 物卡死链条、链轮;搅拌轴左半轴固定安装有左旋搅拌叶片,搅拌轴右半轴固 定安装有右旋搅拌叶片,左旋搅拌叶片和右旋搅拌叶片与铲斗贴合但留有一定 的间隙;搅拌轴安装在铲斗内,在铲斗两端装有轴承,铲斗中部还安装有铲斗 油缸,铲斗油缸对铲斗起限定作用,确保搅拌轴旋转时铲斗保持不动,搅拌马 达驱动搅拌轴,搅拌轴将污泥搅散,通过铲斗输送至污泥管内。搅拌调整机构 包括摆臂、摆臂油缸;摆臂末端通过销轴安装在腔体上且可绕销轴转动,摆臂 前端通过螺栓与铲斗连接,摆臂下部安装有摆臂油缸,摆臂油缸通过销轴安装 在腔体上,摆臂油缸伸出使摆臂上升,摆臂油缸缩回使摆臂下降,通过摆臂的 上升、下降来调整铲斗的位置:油缸伸出,铲斗向上摆动;油缸缩回,铲斗向 下摆动。搅拌动力端包括电机、液压油泵、液压油箱,电机通过联轴器与液压 油泵连接,在电机作用下液压油泵产生压力油驱动搅拌马达、摆臂油缸、铲斗 油缸、污泥泵进行工作。
履带清淤机器人淤泥输送组件包括污泥泵、吸泥管、软管、管接头、排泥 管,污泥泵通过液压马达提供的压力油驱动,铲斗后下部安装有管接头,管接 头即为淤泥收集口,且管接头与铲斗内部连通,污泥泵吸泥管通过软管与铲斗 管接头连接,搅拌轴转动将污泥搅动输送至管接头处,污泥在污泥泵的增压作 用下,再由污泥泵排泥管通过软管输送至地面的泥水分离机器人搅拌池中。
履带清淤机器人行进组件包括履带、履带底盘、行走马达;履带、行走马 达各有两个,履带的行走通过行走马达控制:行走马达同时正转,机器人前进; 行走马达同时反转,机器人后退;行走马达一个正转一个反转,机器人转向; 其中,履带底盘通过螺栓与腔体连接。
履带清淤机器人信号反馈组件包括液压传感障碍预警、油缸伸缩量位移反 馈、视频监控、履带清淤机器人倾斜角度反馈。其中,液压传感障碍预警主要 通过安装在铲斗油缸、摆臂油缸、搅拌马达、行走马达以及污泥泵马达的油管 油路上的压力传感器实时采集管路压力油压力值,履带清淤机器人在清淤过程 中遇到障碍物,首先搅拌马达转速下降,油管油路中压力油的压力升高,压力 传感器将采集到的压力信号通过通讯电缆传送至地面控制箱,地面控制箱接收 到数据并进行处理,在显示屏显示管路压力值;油缸伸缩量位移反馈主要通过 安装在铲斗油缸、摆臂油缸内部的位移传感器,铲斗油缸、摆臂油缸伸出或缩 进,位移传感器采集伸出或缩进位移量,通过通讯电缆传送至地面控制箱进行 处理并将伸缩量显示在显示屏上;视频监控主要是通过在履带清淤机器人顶部 安装摄像头,通过通讯电缆将视频信号实时传送至地面控制箱处理并将视频显 示在显示屏上;履带清淤机器人倾斜角度反馈主要是通过安装在机器人腔体上 的双轴倾角传感器,当机器人倾斜或者爬坡时,实时显示角度变化。
履带清淤机器人地面控制箱包括操纵控制部分、显示屏、信号处理单元; 其中,操纵控制部分包括履带马达手柄、液压阀组手柄、履带清淤机器人启、 停控制键;履带马达手柄用于控制行进组件中履带马达,履带马达手柄有两个, 一个履带马达手柄控制一个马达;液压阀组控制手柄主要用于控制铲斗油缸、 摆臂油缸、搅拌马达动作的快慢以及方向;显示屏用于显示油管管路压力值、 履带清淤机器人实时作业监控视频、履带清淤机器人倾斜角度值;信号处理单 元一方面用于将操纵人员的操作命令进行处理,并通过控制电缆传送至履带清 淤机器人电控箱实现相应的操作指令;信号处理单元另一方面用于对履带清淤 机器人采集到的压力传感器、双轴倾角传感器数字信号、油缸伸缩量信号以及 摄像头的视频信号进行处理,信号处理单元将处理后的数据、信号传送至显示 屏进行显示。通过地面控制箱操作人员可以对履带清淤机器人进行控制并实时 了解设备的运行状况,以便做出判断进行下一步操作。
履带清淤机器人电控箱安装在腔体内,主要用于接收来自地面控制箱的控 制信号,并执行地面控制箱的控制命令。
进一步地,腔体通过螺栓与履带底盘连接,腔体内安装有电机、液压泵、 液压阀、液压邮箱、污泥泵以及电控箱,腔体上安装有摆臂、摆臂油缸。
进一步地,液压阀组安装在液压泵压力油输送管路上,压力油通过液压阀 组分配到各个组件。
进一步地,电机电源通过外接电缆对电机以及电控箱供电。
本发明的泥水分离机器人,包括底盘部分和上装部分,
底盘部分包括动力及散热系统,动力及散热系统包括柴油发动机总成、散 热器总成、柴油箱总成及其附属管路系统;
泥水分离机器人的汽车底盘为符合道路交通运输法规规定的标准汽车底盘 产品,具备自我机动能力,其大梁与底架通过螺栓进行联接。
上装部分包括搅拌总成、螺旋输送机构、液压系统和电气系统;
泥水分离机器人搅拌总成包括两个搅拌池、八个垂直搅拌总成、两个水平 搅拌总成。其中搅拌池为焊接式U型截面结构,其上带各种安装座,以便安装液 压油箱、垂直搅拌总成、水平搅拌总成、螺旋输送机构、输送机提升油缸等; 垂直搅拌总成包括垂直搅拌马达、门式搅拌机构及其连接套,垂直搅拌马达输 出轴端通过平键及紧定螺钉与连接套一端联接,连接套另一端通过螺栓与门式 搅拌机构联接,这样垂直搅拌马达在液压系统压力油的作用下便可实现驱动门 式搅拌机构进行垂直搅拌作业;水平搅拌总成包括水平螺旋搅拌机构、支撑轴 承、水平搅拌马达,水平螺旋搅拌机构为一带螺旋叶片的搅拌轴,该螺旋叶片 主要起带动物料往搅拌池卸料口方向移动及搅拌作用,搅拌轴两端用轴承支撑, 搅拌轴的输入端通过联轴器与水平搅拌马达输出轴联接,这样水平搅拌马达在 液压系统压力油的作用下便可实现驱动水平搅拌机构进行水平搅拌、输送作业。
泥水分离机器人螺旋输送机构包括螺旋输送机、输送机提升油缸。螺旋输 送机其上安装有螺旋输送马达,通过压力油驱动,马达带动螺旋输送机转动实 现螺旋输送,螺旋输送机具有两个铰接点,在工作输送状态,其一个铰接点通 过销轴铰接于搅拌池上,另一铰接点通过销轴与输送机提升油缸杆头端联接, 输送机提升油缸缸体端连接耳通过销轴联接于搅拌池上,这样输送机提升油缸 伸出,则螺旋输送机下放以便螺旋输送机总体缩回避免总车太长不利转场机动; 输送机提升油缸缩回,则螺旋输送机抬高以便把固化后的淤泥输送至一定高度 的专用输运车上;在运输状态螺旋输送机的两个铰接点均通过销轴铰接安装于 搅拌池相应联接耳上。
泥水分离机器人液压、电气系统主要包括一些液压阀组、控制手柄、电控 箱等。柴油发电机点火开关、油门拉线均安装于电控箱上,控制手柄主要控制 水平及垂直搅拌马达的搅拌、输送机提升油缸的伸缩、螺旋输送机输送马达的 转动输送。
本系统中的泥水分离机器人上的两个搅拌池可以同时开启也可以单独开 启,可以采用并联设置或串联设置;当污泥处理量少时,可以只打开一侧搅拌 池工作,当污泥量多时,可以同时开启;当需要达到更好的泥水分离效果时, 可以将左侧搅拌池的出口与右侧搅拌池的入口连接起来,对污泥实施二次分离 程序。
本发明的有益效果是:在施工现场同时实现污泥挖掘和污泥处理,整个过 程安全高效、清洁环保,大大提高了作业效率,同时也降低了作业成本和工人 的劳动强度。





