
申请日2013.09.30
公开(公告)日2014.01.08
IPC分类号G05B13/04; G05D11/00
摘要
针对污水处理过程高度非线性、强耦合性、时变、大滞后和不确定性严重等特点,本发明提出一种基于神经网络的污水处理过程自组织控制方法,实现对污水处理过程中溶解氧(DO)浓度的控制;该控制方法通过建立神经网络直接控制系统,利用神经网络自组织设计实现控制器的结构调整,从而提高控制效果,实现溶解氧浓度的自组织控制;解决了当前基于开关控制和PID控制自适应能力较差,并且控制器结构难以自组织的问题;实验结果表明该方法能够快速、准确地控制溶解氧浓度,并具有较强的自适应能力,提高污水处理的质量和效率、降低污水处理成本,促进污水处理厂高效稳定运行。
权利要求书
1.一种污水处理过程自组织控制方法,其特征包括以下步骤:
(1)确定控制对象;针对序批式间歇活性污泥系统中溶解氧进行控 制,以曝气量为控制量,溶解氧浓度DO为被控量;
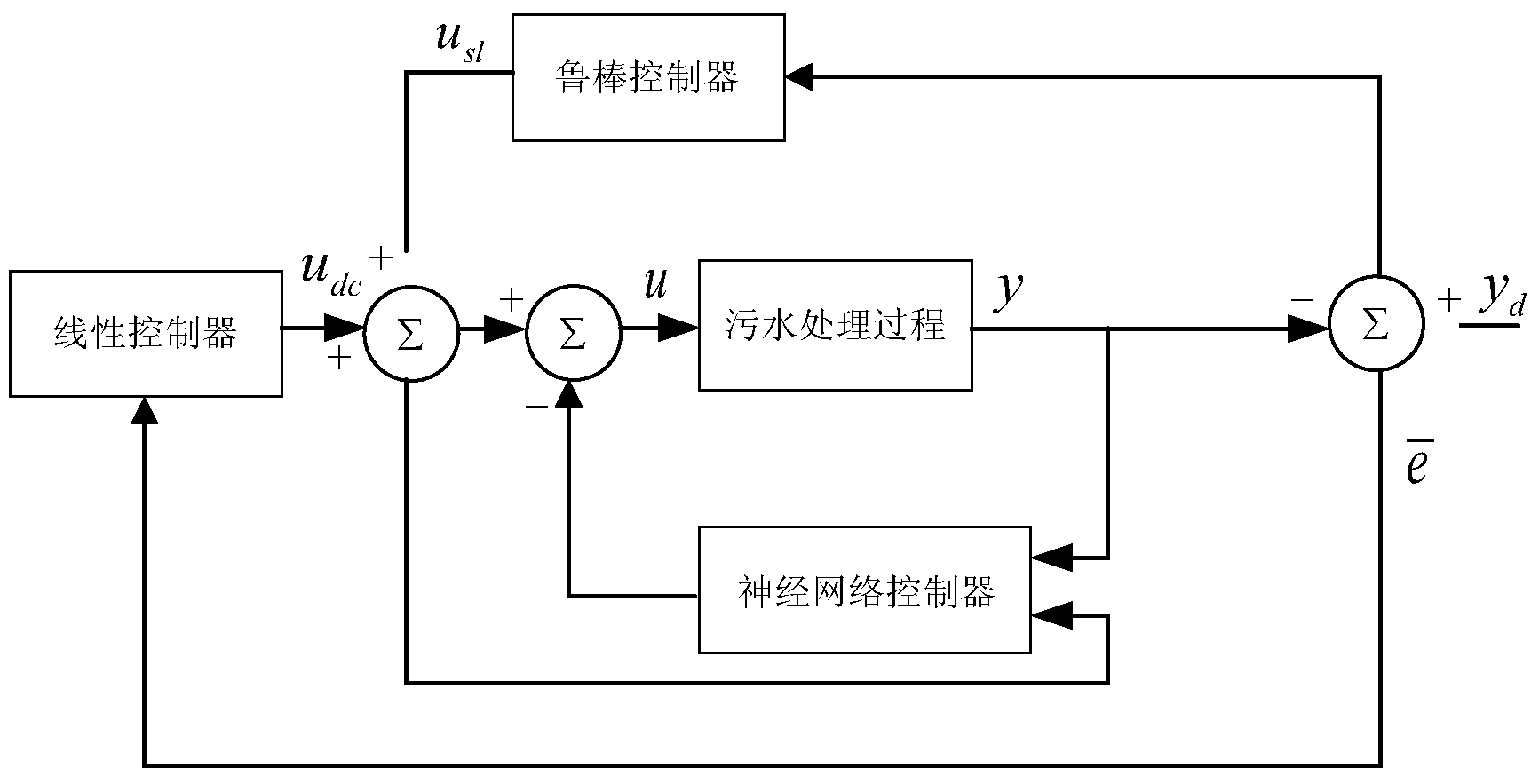
(2)设计用于污水处理过程中溶解氧的控制系统,控制系统分为三部 分:线性控制部分、鲁棒控制部分、神经网络控制部分;具体为:
①设定线性控制部分,线性控制器的输入为:
其中yd是溶解氧浓度的期望输出,y是溶解氧浓度的实际输出;线性 控制器的输出为:
其中udc是线性控制器的输出,h是比例系数,h∈[5,25];
②设定鲁棒控制部分,鲁棒控制器的输入与线性控制器的输入相同; 鲁棒控制器的输出为:
其中γ2是鲁棒控制器设计系数,γ2∈(0,0.5],usl是鲁棒控制器的输出, sgn()是符号函数;
③设定神经网络控制部分,神经网络控制器的输入为x(t)=[yd(t), udc(t)+usl(t)]T,T为公式的转置;神经网络控制器的输出为uad;
(3)设计用于污水处理过程中溶解氧自组织控制方法的RBF神经网络 拓扑结构;网络分为三层:输入层、隐含层、输出层;输入为x(t), 输出为uad;
初始化RBF神经网络:确定神经网络2-K-1的连接方式,即输入 层神经元为2个,隐含层神经元为K个,输出层神经元为1个;对神经 网络的权值进行随机赋值;设第t时刻RBF神经网络输入为x(t),神经 网络的输出表示为uad(t),RBF神经网络的计算功能是:
wk(t)表示隐含层神经元和输出层的连接权值,k=1,2,…,K;θk是 隐含层第k个神经元的输出,其计算公式为:
μk表示隐含层第k个神经元中心值,σk表示隐含层第k个神经元的中心 宽度;
(4)自组织控制方法设计,具体为:
①给定一个RBF神经网络,隐含层神经元为较小自然数,K为小于10 的正整数,输入为x(t);
②计算隐含层神经元k的活跃度Afk,
其中,k=1,2,…,K,Afk是隐含层第k个神经元的活跃度,K是隐含层神 经元数,θk是隐含层第k个神经元的输出;如活跃度Afk小于活跃度阀 值Afo∈[0.01,0.2],网络结构不需要调整;如活跃度Afk大于活跃度阀 值Afo∈[0.01,0.2],分裂神经元k,调整网络结构,并且更新隐含层神 经元数K’=K+1;
③计算隐含层神经元X与输出层神经元Y间的连接强度,假设X和Y是 相互连接的神经元,交互信息的强度M(X;Y)依赖于神经元X和Y间的平 均信息量,神经元X和Y间的连接强度定义为:
M(X;Y)=H(X)-H(X|Y)=H(X)-H(Y|X); (7)
其中,H(X)为X的香农熵,H(Y|X)为Y在X条件下的熵;由公式(7)可知, 当神经元X和Y相互独立时,M(X;Y)的值为0;否则,M(X;Y)为正数; 所以,M(X;Y)≥0,并且
M(X;Y)≤min(H(X),H(Y)); (8)
规则化交互信息的强度
其中0≤m(X;Y)≤1,通过公式(9)可以计算隐含层神经元X与输出层神 经元Y间的连接强度;设定连接强度阀值m0∈[0,0.1],在RBF神经网 络中,当m(X;Y)大于连接强度阀值m0时则说明神经元X和Y间的信息 交互较强,认为X和Y间有连接,网络结构不需要调整;当m(X;Y)小 于连接强度阀值m0时则表明神经元X和Y间的信息交互强度较弱,在 网络结构调整时可忽略神经元X和Y间的连接,从而断开神经元X和Y 间的连接,并且更新隐含层神经元数K’’=K’-1;
④调整神经网络的隐含层神经元与输出层之间的连接权值W(t):
其中,
θ(x(t))=[θ1(x(t)),θ2(x(t)),...,θK''(x(t))]T;
W=[w1,w2,...,wK'']T; (11)
γ1∈(0,0.1]表示神经网络学习率;
⑤根据公式(4),uad(t)为神经网络t时刻的实际输出;
(5)用自组织控制方法实现污水处理过程中溶解氧的控制,控制系统 的总输出为:
其中υ是系统设计系数,υ[5∈,15];控制系统的总输出u即为变频器的 输入,变频器通过调节电动机的转速达到控制鼓风机的目的,最终控 制曝气量,整个控制系统的输出为实际DO浓度值。
说明书
一种污水处理过程自组织控制方法
技术领域
本发明利用基于神经网络的自组织控制方法实现污水处理过程中溶解氧 (DO)浓度的控制,溶解氧(DO)的浓度直接决定了污水处理的效果,对出水水 质和能耗有着重要影响。污水处理过程中溶解氧(DO)的控制作为污水处理的 重要环节,是先进制造技术领域的重要分支,既属于控制领域,又属于水处 理领域。
背景技术
城市污水处理过程控制的最终目标是出水满足排放或回用国家标准,随 着国民经济的增长和公众环保意识的增强,污水处理自动化技术迎来了前所 未有的发展机遇。国家中长期科技发展规划中提出要研究并推广高效、低能 耗的污水处理新技术。因此,本发明的研究成果具有广阔的应用前景。
溶解氧(DO)浓度是目前污水处理中应用最为广泛的运转控制参数,当溶 解氧不足或过量时都会导致污泥生存环境恶化:当氧气不足时,一方面由于好 氧池中丝状菌会大量繁殖,最终产生污泥膨胀,发生异常工况;另一方面由 于好氧菌的生长速率降低从而引起出水水质的下降。而氧气过量(即过量曝气) 则会引起悬浮固体沉降性能变差,影响污水处理系统的正常运行。溶解氧的 控制涉及到微生物的生长环境以及处理过程的能耗,因此,溶解氧控制一直 是研究的重点。
传统的开关控制或者PID控制,虽然是当前应用较为广泛的控制方法, 但是由于氧气的溶解过程受入水水质、温度和pH值等方面的影响,具有高度 非线性、强耦合性、时变和不确定性等特点。采用传统开关控制或者PID控 制方法自适应能力较差,往往不能取得理想的控制效果。同时,由于污水处 理过程具有滞后特性,精确表述控制变量与控制目标之间的关系十分困难。 目前,污水处理过程模型结构复杂、待整定参数过多,可辨识性差,不能动 态地反应出操作变量与控制目标之间的蕴含关系,无法用于在线控制。近年 来,国内外也有基于神经网络的智能控制方法研究,解决了传统开关控制或 者PID控制方法自适应能力较差的问题。但是仍有一些不足,以上智能控制 方法结构无法自适应,并且稳定性难以保证。因此,必须寻求新的控制方法, 以满足污水处理过程控制的需要。优良的控制可以保证污水处理正常运行, 同时也是减少和应对异常工况发生的关键。此外,通过提高污水处理过程自 动化水平,还可以有效地减少运行管理和操作人员,降低运行费用。
本发明设计了一种基于神经网络的自组织控制方法,通过构建神经网络 直接控制系统,利用自组织控制方法实现对污水处理过程中溶解氧(DO)的在 线控制。
发明内容
本发明获得了一种溶解氧DO浓度的自组织控制方法,该控制方法通过 构建神经网络直接控制系统,同时利用神经网络的自组织设计提高控制能力; 解决了控制器根据环境自组织调整的问题,通过控制污水处理过程中的曝气 量从而达到控制DO浓度的目的;提高了污水处理过程中DO控制的精度, 保障污水处理过程正常运行;
本发明采用了如下的技术方案及实现步骤:
1.一种污水处理过程溶解氧DO自组织控制方法的设计,其特征在于, 包括以下步骤:
(1)确定控制对象;本发明主要针对序批式间歇活性污泥系统中溶解氧进 行控制,以曝气量为控制量,溶解氧浓度为被控量;
(2)设计用于污水处理过程中溶解氧的控制系统,如图2,控制系统分为 三部分:线性控制部分、鲁棒控制部分、神经网络控制部分;具体为:
①设定线性控制部分,线性控制器的输入为:
其中yd是溶解氧浓度的期望输出,y是溶解氧浓度的实际输出;线性控制器的 输出为:
其中udc是线性控制器的输出,h是比例系数,h∈[5,25];
②设定鲁棒控制部分,鲁棒控制器的输入与线性控制器的输入相同;鲁 棒控制器的输出为:
其中γ2是鲁棒控制器设计系数,γ2∈(0,0.5],usl是鲁棒控制器的输出,sgn() 是符号函数;
③设定神经网络控制部分,神经网络控制器的输入为x(t)=[yd(t), udc(t)+usl(t)]T,T为公式的转置;神经网络控制器的输出为uad;
(3)设计用于污水处理过程中溶解氧自组织控制方法的RBF神经网络拓 扑结构;网络分为三层:输入层、隐含层、输出层;输入为x(t),输出为uad;
初始化RBF神经网络:确定神经网络2-K-1的连接方式,即输入层神经元 为2个,隐含层神经元为K个,输出层神经元为1个;对神经网络的权值进行随 机赋值;设第t时刻RBF神经网络输入为x(t),神经网络的输出表示为uad(t), RBF神经网络的计算功能是:
wk(t)表示隐含层神经元和输出层的连接权值,k=1,2,…,K;θk是隐含层第 k个神经元的输出,其计算公式为:
μk表示隐含层第k个神经元中心值,σk表示隐含层第k个神经元的中心宽度;
(4)自组织控制方法设计,具体为:
①给定一个RBF神经网络,隐含层神经元为较小自然数,K为小于10的 正整数,如图2,输入为x(t);
②计算隐含层神经元k的活跃度Afk,
其中,k=1,2,…,K,Afk是隐含层第k个神经元的活跃度,K是隐含层神经元数, θk是隐含层第k个神经元的输出;如活跃度Afk小于活跃度阀值Afo∈[0.01,0.2], 网络结构不需要调整;如活跃度Afk大于活跃度阀值Afo∈[0.01,0.2],分裂神经 元k,调整网络结构,并且更新隐含层神经元数K’=K+1;
③计算隐含层神经元X与输出层神经元Y间的连接强度,假设X和Y是相互 连接的神经元,交互信息的强度M(X;Y)依赖于神经元X和Y间的平均信息量, 神经元X和Y间的连接强度定义为:
M(X;Y)=H(X)-H(X|Y)=H(X)-H(Y|X); (7)
其中,H(X)为X的香农熵,H(Y|X)为Y在X条件下的熵;由公式(7)可知,当神经 元X和Y相互独立时,M(X;Y)的值为0;否则,M(X;Y)为正数;所以,M(X;Y)≥0, 并且
M(X;Y)≤min(H(X),H(Y)); (8)
规则化交互信息的强度
其中0≤m(X;Y)≤1,通过公式(9)可以计算隐含层神经元X与输出层神经元Y间的 连接强度;设定连接强度阀值m0∈[0,0.1],在RBF神经网络中,当m(X;Y)大 于连接强度阀值m0时则说明神经元X和Y间的信息交互较强,认为X和Y间有连 接,网络结构不需要调整;当m(X;Y)小于连接强度阀值m0时则表明神经元X 和Y间的信息交互强度较弱,在网络结构调整时可忽略神经元X和Y间的连接, 从而断开神经元X和Y间的连接,并且更新隐含层神经元数K’’=K’-1;
④调整神经网络的隐含层神经元与输出层之间的连接权值W(t):
其中,
θ(x(t))=[θ1(x(t)),θ2(x(t)),...,θK''(x(t))]T;
W=[w1,w2,...,wK'']T; (11)
γ1∈(0,0.1]表示神经网络学习率;
⑤根据公式(4),uad(t)为神经网络t时刻的实际输出;
(5)用自组织控制方法实现污水处理过程中溶解氧的控制,控制系统的总 输出为:
其中υ是系统设计系数,υ控制系统的总输出u即为变频器的输入, 变频器通过调节电动机的转速达到控制鼓风机的目的,最终控制曝气量,整 个控制系统的输出为实际DO浓度值。
本发明的创造性主要体现在:
(1)本发明针对当前活性污泥法污水处理过程是一个复杂的、动态的生物 反应过程,不仅具有非线性、大时变等特点,而且各个因素之间存在强耦合 关系,难以实现溶解氧DO浓度自组织控制,根据神经网络直接控制的特点, 采用了基于线性控制、鲁棒控制、以及神经网络控制相结合的自组织控制方 法实现溶解氧浓度的控制,具有控制精度高、稳定性好等特点;
(2)本发明采用自组织控制方法对污水处理过程溶解氧浓度进行控制,该 自组织控制方法解决了控制器结构难以在线调整的问题,省去了当前污水处 理厂需要人工经验研制控制器的复杂过程,提高了污水处理过程控制自动化 水平。
特别要注意:本发明只是为了描述方便,采用的是对溶解氧浓度的控制, 同样该发明也可适用污水处理过程硝态氮浓度的控制等,只要采用了本发明 的原理进行控制都应该属于本发明的范围。





