
ЁЁЁЁЩъЧыШе2009.01.16
ЁЁЁЁЙЋПЊ(ЙЋИц)Ше2009.12.16
ЁЁЁЁIPCЗжРрКХG01N1/14
ЁЁЁЁеЊвЊ
ЁЁЁЁвЛжжвЃВйзїЮлЫЎШЁбљГЕЃЌАќРЈаЁаЭвЃВйзївЦЖЏЛњЦїШЫЃЌдкаЁаЭвЃВйзївЦЖЏЛњЦїШЫЩЯЩшгаЫЎБУЁЂЭИУїУмБеШнЦїЁЂЛњаЕЪжБлМАгУгкЛёШЁЪТЙЪЯжГЁЕФЭМЯёМАМрВтБЛШЁбљЮлЫЎЕФШнСПЕкЖўЩуЯёЭЗЃЌЕкЖўЩуЯёЭЗЮЛгкЭИУїУмБеШнЦїЕФКѓЗНЃЌдкЫЎБУЩЯЩшгаШЁбљЙмКЭЕМЙмЃЌВЂЧвЫЎБУЕФНјЫЎПкгыШЁбљЙмЕФвЛЖЫСЌНгЃЌШЁбљЙмЕФСэвЛЖЫгыЛњаЕЪжБлАѓЖЈЃЌЕМЙмЕФвЛЖЫгыЫЎБУЕФГіЫЎПкСЌНгЃЌЕМЙмЕФСэвЛЖЫгыЭИУїУмБеШнЦїСЌНгЃЌдкЛњаЕЪжБлЩЯЩшгаЕквЛЩуЯёЭЗЁЃБОЪЕгУаТаЭПЩгІгУгкИпЮлШОгаКІЛЗОГЯТЃЌШЫдБЮоЗЈНгНќЃЌШчЛЏбЇЦЗаЙТЖМАЙЄвЕЮлЫЎЮлШОЪТЙЪЯжГЁЃЌВЂЪЕЯжЖдЮлЫЎШЁбљЁЃБОЪЕгУаТаЭвдаЁаЭвЃВйзївЦЖЏЛњЦїШЫЮЊЦНЬЈЃЌвдвЃВйзїЕФвЦЖЏЛњЦїШЫЬцДњЛЗБЃШЫдБНјШыЮлШОЯжГЁЃЌЪЕЯжСЫЛЗБЃШЫдБЕФСуЩЫЭіЁЃ
ЁЁЁЁШЈРћвЊЧѓЪщ
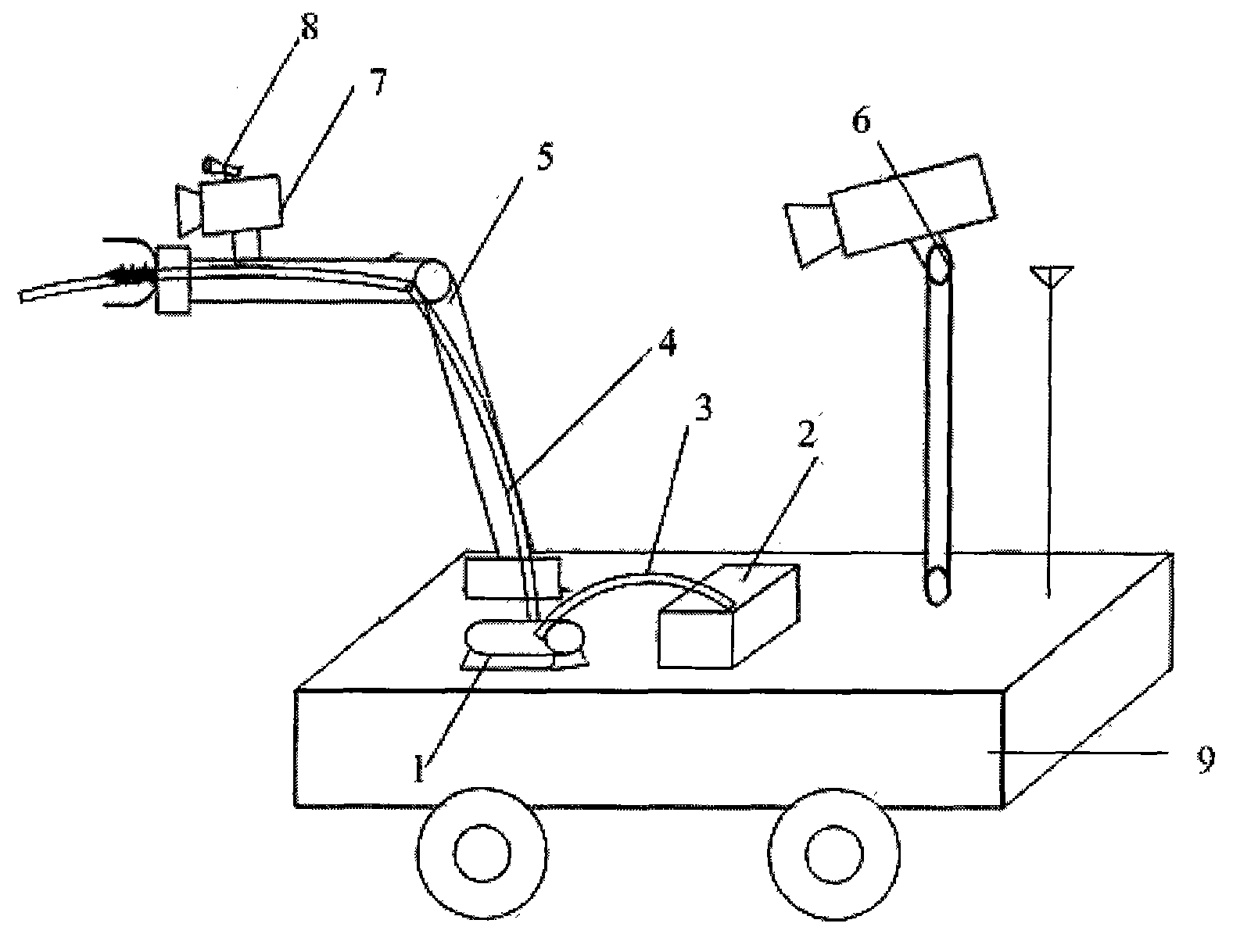
ЁЁЁЁ1.вЛжжвЃВйзїЮлЫЎШЁбљГЕЃЌЦфЬиеїдкгкАќРЈаЁаЭвЃВйзївЦЖЏЛњЦїШЫ(9)ЃЌ дкаЁаЭвЃВйзївЦЖЏЛњЦїШЫ(9)ЩЯЩшгаЫЎБУ(1)ЁЂЭИУїУмБеШнЦї(2)ЁЂЛњаЕЪжБл (5)МАгУгкЛёШЁЪТЙЪЯжГЁЕФЭМЯёМАМрВтБЛШЁбљЮлЫЎЕФШнСПЕкЖўЩуЯёЭЗ(6)ЃЌЕк ЖўЩуЯёЭЗ(6)ЮЛгкЭИУїУмБеШнЦї(2)ЕФКѓЗНЃЌдкЫЎБУ(1)ЩЯЩшгаШЁбљЙм(4) КЭЕМЙм(3)ЃЌВЂЧвЫЎБУ(1)ЕФНјЫЎПкгыШЁбљЙм(4)ЕФвЛЖЫСЌНгЃЌШЁбљЙм(4) ЕФСэвЛЖЫгыЛњаЕЪжБл(5)АѓЖЈЃЌЕМЙм(3)ЕФвЛЖЫгыЫЎБУ(1)ЕФГіЫЎПкСЌНгЃЌ ЕМЙм(3)ЕФСэвЛЖЫгыЭИУїУмБеШнЦї(2)СЌНгЃЌдкЛњаЕЪжБл(5)ЩЯЩшгаЕквЛЩу ЯёЭЗ(7)ЁЃ
ЁЁЁЁ2.ИљОнШЈРћвЊЧѓ1ЫљЪіЕФвЃВйзїЮлЫЎШЁбљГЕЃЌЦфЬиеїдкгкдкЕквЛЩуЯёЭЗ(7) ЩЯЩшгаТѓПЫЗч(8)ЁЃ
ЁЁЁЁЫЕУїЪщ
ЁЁЁЁвЃВйзїЮлЫЎШЁбљГЕ
ЁЁЁЁММЪѕСьгђ
ЁЁЁЁБОЪЕгУаТаЭЩцМАИпЮлШОгаКІЛЗОГЯТЕФЮлЫЎШЁбљзАжУЃЌЬиБ№ЪЧЩцМАДюдигкаЁаЭ вЦЖЏЛњЦїШЫЩЯЕФвЃВйзїЮлЫЎШЁбљГЕЁЃ
ЁЁЁЁБГОАММЪѕ
ЁЁЁЁЫфШЛвЦЖЏЛњЦїШЫЕФИХФюКЭЙЄзїгВМўвбОГіЯжСЫМИЪЎФъЃЌдкгаКІЛЗОГЛђгаЧБдк ЮЃЯеЬѕМўЯТгУЛњЕчЩшБИЬцДњвЛИіЛђЖрИіШЫдБЕФетвЛЯыЗЈвбГЩЮЊЛЗБЃМрВтЁЂжДЗЈВП УХЁЂвдМАПБВтЯюФПжаЕФживЊФкШнЃЌЕЋдкзюНќВЛЖЯЗЂЩњЕФздШЛджКІКЭжиЙЄвЕЮлЫЎаЙ ТЖЪТМўжаЃЌКмЖрЕЅЮЛбажЦЕФвЦЖЏЛњЦїШЫжЛФмНјШыЯжГЁеьВтЃЌЖјУЛгаАьЗЈВЩМЏЮлШО вКЬхЃЌДгЖјИјЮлШОЧщПіЕФЕїВщШЁжЄЙЄзїДјРДСЫФбЖШЁЃБОзЈРћОЭЪЧЪЕгУаТаЭСЫвЛжж ПЩАВзАдкаЁаЭвЦЖЏЛњЦїШЫЩЯЕФЮлЫЎШЁбљзАжУЃЌгУгкЭъГЩдкИпЮлШОгаКІЛђЮЃЯеЛЗОГ ЯТЖдЮлЫЎЕФВЩМЏШЁбљЃЌЪЕЯжСЫДЋЭГВЩМЏЪжЖЮЕФДДаТЁЃдкаЏДјСЫЩуЯёЭЗЕШМрВтвЧЦї ЕФвЃВйзївЦЖЏЛњЦїШЫНјШыЮлШОЯжГЁКѓЃЌЭЈЙ§ЮоЯпДЋЪфНЋЮлЫЎаЙТЖЪТЙЪЯжГЁЕФаХЯЂ ДЋЛиБОЕиВйзїЦНЬЈЃЌЖдЮлШОдДЖЈЮЛЃЌдЖЖЫВйзїдБРћгУаЁаЭвЦЖЏЛњЦїШЫдЖГЬВйзїЯЕ ЭГЃЌЭЈЙ§ПижЦЛњаЕЪжБлНЋГщЫЎЙмВхШыЪмЮлШОвКУцвдЯТЃЌПижЦЕчТЗЕУЕНВЩМЏвКЬЌбљ БОЕФжИСюКѓЛсЦєЖЏЮЂаЭЫЎБУЕчдДЃЌНЋЮлЫЎбљБОЪеМЏЛиГЕдиУмБеШнЦїжаЁЃД§ВЩМЏЭъ БЯКѓЙиБеВЩМЏЯЕЭГЃЌПижЦЪжБлНЋГщЫЎЙмвЦГівКУцЃЌЭъГЩЪмЮлШОвКЬхЕФВЩМЏЙЄзїЁЃ
ЁЁЁЁЪЕгУаТаЭФкШн
ЁЁЁЁБОЪЕгУаТаЭЬсГіСЫвЛжжЛљгкаЁаЭвЃВйзївЦЖЏЛњЦїШЫЕФвЃВйзїЮлЫЎШЁбљГЕЃЌ вдЪЙаЁаЭвЦЖЏЛњЦїШЫФмЙЛДњЬцЛЗБЃШЫдБНјШыИпЮлШОгаКІЛЗОГЛђЧБдкЮЃЯеЛЗОГНј ааЮлЫЎШЁбљЁЃ
ЁЁЁЁЮЊНтОіЩЯЪіЮЪЬтЃЌБОЪЕгУаТаЭВЩгУШчЯТММЪѕЗНАИЃК
ЁЁЁЁвЛжжвЃВйзїЮлЫЎШЁбљГЕЃЌАќРЈаЁаЭвЃВйзївЦЖЏЛњЦїШЫЃЌдкаЁаЭвЃВйзївЦЖЏЛњ ЦїШЫЩЯЩшгаЫЎБУЁЂЭИУїУмБеШнЦїЁЂЛњаЕЪжБлМАгУгкЛёШЁЪТЙЪЯжГЁЕФЭМЯёМАМрВтБЛ ШЁбљЮлЫЎЕФШнСПЕкЖўЩуЯёЭЗЃЌЕкЖўЩуЯёЭЗЮЛгкЭИУїУмБеШнЦїЕФКѓЗНЃЌдкЫЎБУЩЯЩш гаШЁбљЙмКЭЕМЙмЃЌВЂЧвЫЎБУЕФНјЫЎПкгыШЁбљЙмЕФвЛЖЫСЌНгЃЌШЁбљЙмЕФСэвЛЖЫгыЛњ аЕЪжБлАѓЖЈЃЌЕМЙмЕФвЛЖЫгыЫЎБУЕФГіЫЎПкСЌНгЃЌЕМЙмЕФСэвЛЖЫгыЭИУїУм БеШнЦїСЌНгЃЌдкЛњаЕЪжБлЩЯЩшгаЕквЛЩуЯёЭЗЁЃ
ЁЁЁЁгыЯжгаЛЗОГеьВтММЪѕЯрБШЃЌБОЪЕгУаТаЭОпгаШчЯТгХЕуЃК
ЁЁЁЁБОЪЕгУаТаЭвдаЁаЭвЃВйзївЦЖЏЛњЦїШЫЮЊЦНЬЈЃЌвдвЃВйзїЕФвЦЖЏЛњЦїШЫЬцДњЛЗ БЃШЫдБНјШыЮлШОЯжГЁЃЌЪЕЯжСЫЛЗБЃШЫдБЕФСуЩЫЭі;БОЪЕгУаТаЭдкЮлШОЯжГЁЃЌМШПЩ ИљОнзАдиЕФЕкЖўЬЈЩуЯёЛњДЋЛиЕФЯжГЁЭМЯёРДСЫНтЮлЫЎаЙТЖЧщПіЃЌвВПЩИљОнзАдкЛњ аЕЪжБлЩЯЕФТѓПЫЗчАяжњВйзїШЫдБХаЖЯЮлШОдДЮЛжУЃЌбАевЮлШОдДЕФЗНЗЈСщЛюЁЂМђЕЅЁЂ ПЩПП;гЩгкБОЪЕгУаТаЭДюдиСЫЮлЫЎШЁбљзАжУЃЌдкДЋЭГеьВтЕФЛљДЁЩЯЃЌПЩЯжГЁЖдЮл ЫЎВЩМЏЃЌМѕЩйСЫЛЗБЃШЫдБЕїВщШЁжЄЕФЪБМфЁЃ
ЁЁЁЁБОЪЕгУаТаЭПЩгІгУгкИпЮлШОгаКІЛЗОГЯТЃЌШЫдБЮоЗЈНгНќЃЌШчздШЛджКІЁЂЛЏбЇ ЦЗаЙТЖМАЙЄвЕЮлЫЎЮлШОЪТЙЪЯжГЁЃЌВЂЪЕЯжЖдЮлЫЎШЁбљЁЃ





