
����������2018.03.09
��������(����)��2018.09.14
����IPC�����G01N21/954; G01S15/93; G01S17/93
����ժҪ
�����������漰һ�ֻ�����ˮ���������˵ļ�ⷽ�����������˱���������������Լ���ȫ���������˱����Դ���ֶ���������ͨ��Ͷ��ܵ���;ͨ���������ϵͳ�ƶ�����������ɼ��ָ����·��������ͼ��ָ���������˱���;�����˱�����ݼ������ͼ��ָ���ʼ�������̣������������̰����˶����̡����ݲɼ������Լ����ݴ�������;�������Ļ����˼��֮ǰ����Ҫ�Ÿɹܵ��ڲ���ˮ����˿���������ʱ����м�⣬�������Ч�ʡ�
��
����Ȩ��Ҫ����
����1.һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڰ������²��裺
����S1.�������˱���������������Լ���ȫ���������˱����Դ���ֶ���������ͨ��Ͷ��ܵ���;
����S2. ͨ���������ϵͳ�ƶ�����������ɼ��ָ����·��������ͼ��ָ���������˱���;
����S3. �����˱�����ݼ������ͼ��ָ���ʼ�������̣������������̰����˶����̡����ݲɼ������Լ����ݴ�������;
����S4. �����˱��彫�ɼ���Ϣ�����λ����Ϣ���͵��������ϵͳ��
����2.����Ȩ��Ҫ��1������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ������˶����̼������˱����յ����ָ����ݼ�����������յ�λ�ã�Ȼ�����˱���ĵ�ǰλ�����յ�λ�ý��бȽϣ������û�е����յ�λ�ã������˱����ع���ǰ����ǰ�������и��ݻ����˱����еĶ�λģ���ȡ�����˱������̬�ͺ���ǶȽ��к���λ������ǰ���ķ���
����3.����Ȩ��Ҫ��1������һ�ֻ�����ˮ���������˵ļ�ⷽ���������������������ݲɼ����̰��������¶�λ�ɼ�������վ����ƶ�վ��λ�ɼ�֮��һ�֡�
����4.����Ȩ��Ҫ��3������һ�ֻ�����ˮ ���������˵ļ�ⷽ�������������ڣ����������»���CCD�����;�������¶�λ�ɼ��������˱���ʹ��������¶�λ����ȡ�����˱��������Ͷ�ſڵ�λ������;������´Ӿ��»�ǣ�������������ÿ���̶��ļ�����ϱ�ǣ����»��ij��߿�λ��Ͷ�ſ��ԣ����»��ϰ�װ��CCD���������ʱ�ɼ�����ͼ��ͨ��ͼ��ʶ��ķ�ʽ���ͼ�����Ƿ������ǣ�������Ͷ�����µij��ȡ�
����5.����Ȩ��Ҫ��3������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ�����������վ���ƶ�վ;��������վ����ƶ�վ��λ�ɼ����ڼ�����㡢�յ㰲װ����վ���ڻ����˱����ϰ�װ�ƶ�վ��ͨ�����������˱��嵽ÿһ����վ�ľ��룬�������Ƕ�λԭ������������˱����ڹ����е����λ�á�
����6.����Ȩ��Ҫ��3������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ����������Դ����������¶�λ�ɼ�������վ����ƶ�վ��λ�ɼ��ɽ���������Դ��������������ںϣ���һ����߶�λ���ȡ�
����7.����Ȩ��Ҫ��6������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������������ںϲ����ض��㷨��ɣ������ض��㷨���£�
����״̬���� X(k|k-1)=A�qX(k-1)+B�qU(K)+W(k)
�����۲ⷽ�� Z(k)=H�qX(k)+V(k)
����X=[s v]T��U=[0 a]T��Z=[s 0]T
��������sΪ�����˱���λ�ã�vΪ�����˱����ٶȣ�aΪ���Դ���������ļ��ٶ�;���ݾ���Ļ�е�ṹ�����г�����A��B��H��ͨ��ʵ��õ�״̬���̵�����W�Ͳ���ϵͳ������V;
����ͨ��״̬���̿��Լ����Ԥ��ֵX(k|k-1)��ͨ�������˶�λģ����Ի�ȡ����ֵZ(k)��Ȼ��ͨ�����¹�ʽ�õ����Ż�����ֵ����ֵ��Ϊ�����˵�ǰ��λ��;
����X(k|k)= X(k|k-1)+Kg�q(Z(k)-H�qX(k|k-1))
��������KgΪ���������棬ͨ�����¹�ʽ���㣺
������ʽ�У�RΪ����ϵͳ��Э�������,
����Ϊ״̬���̵�Э�������;
����P(k|k-1)=A�qP(k-1|k-1) AT+Q
������ʽ��QΪ״̬���̵�Э�������;���յõ���k״̬�����ŵĹ���ֵX(k|k);
����ͬʱ����k״̬��X(k|k)��Э�������P(k|k)=(I-Kg�qH)P(k|k-1)��
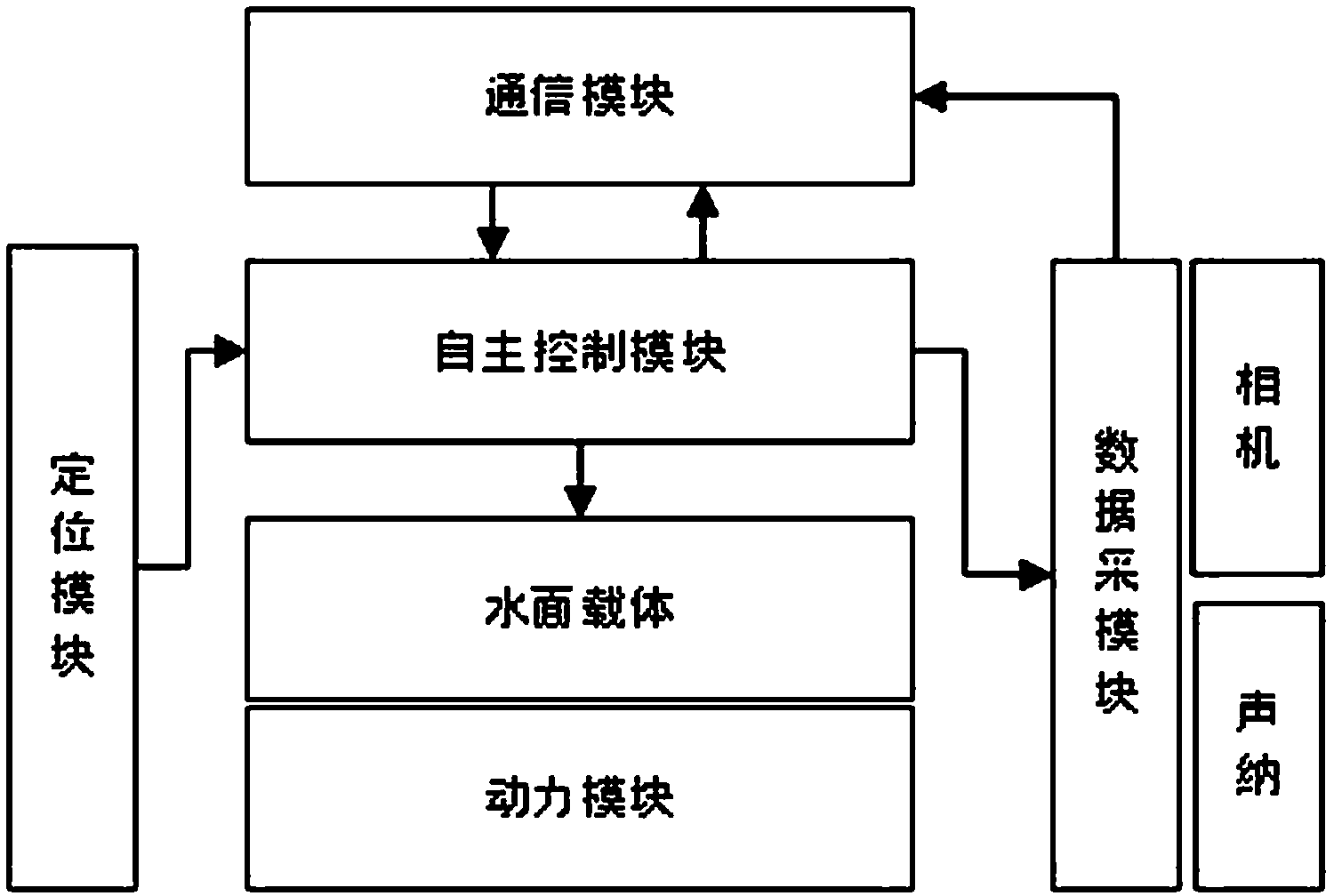
����8.����Ȩ��Ҫ��7������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ����������˱��������������ģ�顢�²���Ƶ�Ԫ;�����²���Ƶ�Ԫ�����������������ת�����������;������������ģ�齫�ɼ�����ͨ�������ض��㷨ת��Ϊÿһ��ʱ�̵�λ�ú��ٶȣ�����ǰ�ٶȺͼ�������е�Ŀ���ٶȽ��бȽϣ������һ�£������²���Ƶ�Ԫ�����ٶ�ָ��ٶ�ָ����������ת��Ϊ����������������ı���������ת�٣��Ӷ����ڻ����˱���ǰ�����ٶȡ�
����9.����Ȩ��Ҫ��1������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ����������˱��廹��������ģ�飬��������˱���ı���ģ�鷢���ϰ�������˱���ͣ�²���ͼ�ƹ�;���ϰ����ƹ������õ������ϵͳ�ѻ����˱����л����ֶ�����ģʽ���ֶ�ң���ƹ��ϰ������˱�������ع滮·����⡣
����10.����Ȩ��Ҫ��2������һ�ֻ�����ˮ���������˵ļ�ⷽ�������������ڣ���������λ������ȡ�����˱���������������ڵĴ�ֱ���룬�Լ���Թ������ĵĺ����;
���������״��Թ̶�Ƶ�ʻ�ȡ��Χ�����ݣ��ܵ���ڵ��״����ݱ���Ϊ����ֱ�ߣ����״�����������������ֱ�����ݣ����������������һ�����㷨������ϳ�����ֱ�ߵķ��̣��ֱ�Ϊ��
��������A1��B1��C1��A2��B2��C2�Ƿ��̵�ϵ��;
���������˱����������ڵľ���Ϊ��
���������˱���ĺ����Ϊ����
����˵����
����һ�ֻ�����ˮ���������˵ļ�ⷽ��
������������
�����������漰һ�ּ�ⷽ��������˵��һ�ֻ�����ˮ���������˵ļ�ⷽ����
������������
����������ˮ�����dz��е���Ҫ������ʩ֮һ�����ų��з�չ����ˮ�����İ�ȫ���������Ե�������Ҫ������ˮ�����Ĺ���Ҫ��Ҳ����ߡ��ڿ���⼼��Ϊ������ˮ�ܵ������й����ṩ�ɿ����ֶΣ�ͨ���ڿ������Լ�ʱ���ֹܵ��ĸ�ʴ�����𣬽ӿڴ�λ���ٻ����Ṹ�Ȳ���״������ʱ�����Ӷ������ܵ���ʹ�����ޡ�Ŀǰ�����ϵĹܵ��������˾�Ϊ��ʽ�ṹ��ʹ��ʱ��Ҫ�ѹܵ��ڵ�ˮ��ɣ����ǹܵ���ˮ�漰�Ĺ������dz��ƴ����������˼���IJ��㡣
������������
����Ϊ�˷����м������ڵ��������⣬�������ṩ��һ�ֻ�����ˮ���������˵ļ�ⷽ�����÷����������Ч�ʸߣ��������ȷ�ȸߣ����ҽ����˹�����Ա���Ͷ�ǿ�ȣ�����Ч���Ϲ�����Ա��������ȫ��
���������������¼�������ʵ�֣�
����һ�ֻ�����ˮ���������˵ļ�ⷽ�����������²��裺
����S1.�������˱���������������Լ���ȫ���������˱����Դ���ֶ���������ͨ��Ͷ��ܵ���;
����S2. ͨ���������ϵͳ�ƶ�����������ɼ��ָ����·��������ͼ��ָ���������˱���;�������ϵͳ�ƶ�������������һϵ�м��ָ���һ����˳���·��������˱���;
����S3. �����˱�����ݼ������ͼ��ָ���ʼ�������̣������������̰����˶����̡����ݲɼ������Լ����ݴ�������;
����S4. �����˱��彫�ɼ���Ϣ�����λ����Ϣ���͵��������ϵͳ��
������һ���ģ������˶����̼������˱����յ����ָ����ݼ�����������յ�λ�ã�Ȼ�����˱���ĵ�ǰλ�����յ�λ�ý��бȽϣ������û�е����յ�λ�ã������˱����ع���ǰ����ǰ�������и��ݶ�λģ���ȡ�����˱������̬�ͺ���ǶȽ��к���λ������ǰ���ķ���
������һ���ģ��������ݲɼ����̰��������¶�λ�ɼ�������վ����ƶ�վ��λ�ɼ�֮��һ�֡�
������һ���ģ����������»���CCD�����;�������¶�λ�ɼ��������˱���ʹ��������¶�λ����ȡ�����˱��������Ͷ�ſڵ�λ������;������´Ӿ��»�ǣ�������������ÿ���̶��ļ�����ϱ�ǣ����»��ij��߿�λ��Ͷ�ſ��ԣ����»��ϰ�װ��CCD���������ʱ�ɼ�����ͼ��ͨ��ͼ��ʶ��ķ�ʽ���ͼ�����Ƿ������ǣ�������Ͷ�����µij���;������������¼�������1��������ֵ����ÿ�������֮��ľ��뼴Ϊ��������ʹ�����µij��ȣ��ó��ȼ�Ϊ�����˾���Ͷ�ſڵij��ȡ�
������һ���ģ�����������վ���ƶ�վ;��������վ����ƶ�վ��λ�ɼ����ڼ�����㡢�յ㰲װ����վ���ڻ����˱����ϰ�װ�ƶ�վ��ͨ�����������˱��嵽ÿһ����վ�ľ��룬�������Ƕ�λԭ������������˱����ڹ����е����λ�á�
������һ���ģ����������Դ����������¶�λ�ɼ�������վ����ƶ�վ��λ�ɼ��ɽ���������Դ��������������ںϣ���һ����߶�λ���ȡ�
������һ���ģ������ںϲ����ض��㷨��ɣ������ض��㷨���£�
����״̬���� X(k|k-1)=A�qX(k-1)+B�qU(K)+W(k)
�����۲ⷽ�� Z(k)=H�qX(k)+V(k)
����X=[s v]T��U=[0 a]T��Z=[s 0]T
��������sΪ�����˱���λ�ã�vΪ�����˱����ٶȣ�aΪ���Դ���������ļ��ٶ�;���ݾ���Ļ�е�ṹ�����г�����A��B��H��ͨ��ʵ��õ�״̬���̵�����W�Ͳ���ϵͳ������V;
����ͨ��״̬���̿��Լ����Ԥ��ֵX(k|k-1)��ͨ���������������������Ի�ȡ����ֵZ(k)��Ȼ��ͨ�����¹�ʽ�õ����Ż�����ֵ����ֵ��Ϊ�����˵�ǰ��λ��;
����X(k|k)= X(k|k-1)+Kg�q(Z(k)-H�qX(k|k-1))
����KgΪ���������棬ͨ�����¹�ʽ���㣺����P(k|k-1)=A�qP(k-1|k-1) AT+Q
������ʽ��QΪ״̬���̵�Э�������;���յõ���k״̬�����ŵĹ���ֵX(k|k);
����ͬʱ����k״̬��X(k|k)��Э�������P(k|k)=(I-Kg�qH)P(k|k-1)��
������һ���ģ����������˱��������������ģ�顢�²���Ƶ�Ԫ;�����²���Ƶ�Ԫ�����������������ת�����������;������������ģ�齫�ɼ�����ͨ�������ض��㷨ת��Ϊÿһ��ʱ�̵�λ�ú��ٶȣ�����ǰ�ٶȺͼ�������е�Ŀ���ٶȽ��бȽϣ������һ�£������²���Ƶ�Ԫ�����ٶ�ָ��ٶ�ָ����������ת��Ϊ����������������ı���������ת�٣��Ӷ����ڻ����˱���ǰ�����ٶȡ�
������һ���ģ����������˱��廹��������ģ�飬��������˱���ı���ģ�鷢���ϰ�������˱���ͣ�²���ͼ�ƹ�;���ϰ����ƹ������õ������ϵͳ�ѻ����˱����л����ֶ�����ģʽ���ֶ�ң���ƹ��ϰ������˱�������ع滮·����⡣
������һ���ģ����������״����λ�ķ����ǣ�
������ȡ�����˱���������������ڵĴ�ֱ���룬�Լ���Թ������ĵĺ����;
���������״��Թ̶�Ƶ�ʻ�ȡ��Χ�����ݣ��ܵ���ڵ��״����ݱ���Ϊ����ֱ�ߣ����״�����������������ֱ�����ݣ����������������һ�����㷨������ϳ�����ֱ�ߵķ��̣��ֱ�Ϊ��
��������A1��B1��C1��A2��B2��C2�Ƿ��̵�ϵ��;
���������˱����������ڵľ���Ϊ��
���������м�����ȣ�������������Ч�����£�
�������еĹܵ������˼��֮ǰ��Ҫ�Ÿɹܵ��ڲ���ˮ��������ˮ��һ����Ҫ�ಿ����ϵĺƴ̣�������Ӱ�����������ˮ;�������Ļ����˼��֮ǰ����Ҫ�Ÿɹܵ��ڲ���ˮ����˿���������ʱ����м�⣬�������Ч�ʡ�
����������ͨ���ض��㷨���������ںϣ���һ������˻�����ϵͳ�Ķ�λ���ȣ��Ӷ���ȷ�������ڲ�����ȱ�ݣ����Խ��и�Ч���������������⣬�û�����ϵͳ�����ɿ�����ȫ�����ͨ���˹����ĸ�ǿ�ȹ����ͼ�����IJ�ȷ�ԡ�





