
°°°°…к«л»’2015.09.30
°°°°єЂњ™(єЂЄж)»’2016.03.02
°°°°IPCЈ÷јаЇ≈G05B19/042
°°°°’™“™
°°°°±Њ µ”√–¬–ЌєЂњ™ЅЋ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∞ьј®µЎ√жњЎ÷∆ѕµЌ≥£ђµЎ√жњЎ÷∆ѕµЌ≥Ќ®єэ‘ґ≥ћЌ®–≈ƒ£њй”лїъ∆ч»Ћƒ£њйƒЏ≤њµƒќҐі¶јн∆чѕаЅђ£ђїъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чѕаЅђµƒµз≥Ўƒ£њй°Ґ«эґѓњЎ÷∆ д≥цƒ£њй°ҐЌЉѕс≤…Љѓƒ£њй°Ґќёѕя эЊЁљ” ’ƒ£њй“‘Љ∞ќёѕяњЎ÷∆ƒ£њй;ќёѕя эЊЁљ” ’ƒ£њйїє”ліЂЄ–∆чƒ£њйƒЏµƒќёѕя эЊЁЈҐЋЌƒ£њйќёѕяЅђљ”£ђќёѕяњЎ÷∆ƒ£њй”лќџЋЃі¶јнѕµЌ≥ƒЏµƒќёѕяњЎ÷∆∆чќёѕяЅђљ”;іЂЄ–∆чƒ£њй”лќџЋЃі¶јнѕµЌ≥ѕаЅђ°£±Њ µ”√–¬–ЌЌ®єэ≤…”√їъ∆ч»Ћƒ£њйґ‘ќџЋЃі¶јнµƒєэ≥ћљш––ЉањЎ°Ґ эЊЁ≤…Љѓ°Ґ“‘Љ∞њЎ÷∆£ђћбЄяЅйїо–‘£ђљµµЌЅЋЉањЎ≥…±Њ;їъ∆ч»Ћƒ£њйµƒЅйїо–‘Ї√£ђґ‘ќџЋЃі¶јнѕµЌ≥ЉањЎЇЌњЎ÷∆µƒЈґќІіу£ђљш––’лґ‘–‘њЎ÷∆ЇЌµч’ыµƒƒ№Ѕ¶«њ°£
°°°°’™“™ЄљЌЉ
°°°°»®јы“™«у й
°°°°1.“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£Ї∞ьј®µЎ√жњЎ÷∆ѕµЌ≥£ђЋщ цµЎ√жњЎ÷∆ѕµЌ≥Ќ®єэ‘ґ≥ћЌ®–≈ƒ£њй”лїъ∆ч»Ћƒ£њйƒЏ≤њµƒќҐі¶јн∆чѕаЅђ£ђїъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чѕаЅђµƒµз≥Ўƒ£њй°Ґ«эґѓњЎ÷∆ д≥цƒ£њй°ҐЌЉѕс≤…Љѓƒ£њй°Ґќёѕя эЊЁљ” ’ƒ£њй“‘Љ∞ќёѕяњЎ÷∆ƒ£њй;Ћщ цќёѕя эЊЁљ” ’ƒ£њйїє”ліЂЄ–∆чƒ£њйƒЏµƒќёѕя эЊЁЈҐЋЌƒ£њйќёѕяЅђљ”£ђЋщ цќёѕяњЎ÷∆ƒ£њй”лќџЋЃі¶јнѕµЌ≥ƒЏµƒќёѕяњЎ÷∆∆чќёѕяЅђљ”;Ћщ ціЂЄ–∆чƒ£њй”лќџЋЃі¶јнѕµЌ≥ѕаЅђ°£
°°°°2.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цїъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чЅђљ”µƒќёѕя–≈Ї≈Є–”¶ƒ£њй£ђіЂЄ–∆чƒ£њйƒЏ…и”–ќёѕя–≈Ї≈ЈҐЋЌƒ£њй£ђ«“ќёѕя–≈Ї≈Є–”¶ƒ£њй”лќёѕя–≈Ї≈ЈҐЋЌƒ£њйќёѕяЅђљ”°£
°°°°3.ЄщЊЁ»®јы“™«у1їт2Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цїъ∆ч»Ћƒ£њйќ™Ј…––ќё»Ћїъїъ∆ч»Ћ°£
°°°°4.ЄщЊЁ»®јы“™«у3Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цїъ∆ч»Ћƒ£њйƒЏµƒ«эґѓњЎ÷∆ д≥цƒ£њй∞ьј®Ј…––«эґѓ д≥цƒ£њй”лЈљѕтњЎ÷∆ƒ£њй°£
°°°°5.ЄщЊЁ»®јы“™«у1їт2Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цїъ∆ч»Ћƒ£њйќ™ќё»Ћіђїъ∆ч»Ћ°£
°°°°6.ЄщЊЁ»®јы“™«у5Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цїъ∆ч»Ћƒ£њйƒЏµƒ«эґѓњЎ÷∆ д≥цƒ£њй∞ьј®ґѓЅ¶«эґѓ д≥цƒ£њй”лЈљѕтњЎ÷∆ƒ£њй°£
°°°°7.ЄщЊЁ»®јы“™«у1їт2Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цµз≥Ўƒ£њйќ™ћЂ—фƒ№µз≥Ў∞е°£
°°°°8.ЄщЊЁ»®јы“™«у1їт2Ћщ цµƒ“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ЇЋщ цЌЉѕс≤…Љѓƒ£њйќ™…гѕсїъ°£
°°°°Ћµ√ч й
°°°°“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥
°°°°ЉЉ хЅм”т
°°°°±Њ µ”√–¬–Ќ…жЉ∞ќџЋЃі¶јнЅм”т£ђЊяће «÷Є“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥°£
°°°°±≥Њ∞ЉЉ х
°°°°ќџЋЃі¶јн≥ІµƒќџЋЃі¶јнє§–т÷–£ђњЎ÷∆Ї√Єч÷÷ЋЃ÷ ≤ќ эґ‘ЋЃµƒЊїїѓі¶јнЉЂќ™÷Ў“™°£і¶јнєэ≥ћ“™«уґ‘ќџЋЃі¶јн≥ІљшЋЃЅчЅњ°ҐљшЋЃєћће–ьЄ°ќп≈®ґ»°ҐљшЋЃPH÷µ°ҐљшЋЃќ¬ґ»°Ґ—хїѓєµ»№љв—х(DO)≈®ґ»°Ґ≥цЋЃ”଻°Ґ≥цЋЃ…ъїѓ–и—хЅњ(BOD)µ»ґаЄцƒ£ƒвЅњљш––≤…Љѓ°Ґѕ‘ Њ°ҐіжіҐ°Ґіт”°£ђЅнЌвїє“™«уґ‘ЋЃ±√µ»њ™єЎЅњљш––Љм≤вЇЌњЎ÷∆°£“тіЋ£ђќџЋЃі¶јнњЎ÷∆ѕµЌ≥µƒ…иЉ∆…жЉ∞µљµƒ≤ќ эЉ∞їЈљЏ±»љѕґа£ђ»зЇќ‘ЏќџЋЃі¶јнєэ≥ћ÷–£ђљш––ќџЋЃі¶јн эЊЁµƒ≤…ЉѓЇЌ µ ±ЉањЎґ‘ќџЋЃі¶јнњЎ÷∆ѕµЌ≥”–„≈÷Ў“™µƒ„ч”√°£
°°°°ѕ÷”–µƒќџЋЃі¶јнѕµЌ≥£ђЊщ≤…”√єћґ®µƒЉањЎїтњЎ÷∆…и±Є£ђЌ®єэ“‘ћЂЌшµƒ–≈ѕҐіЂµЁ£ђґ‘ќџЋЃі¶јнєэ≥ћљш––њЎ÷∆°£”…”ЏќџЋЃі¶јнµƒЄч÷÷…и±ЄµƒѕаЄфљѕ‘ґ£ђµЎјн…ѕЈ÷≤ЉЈ÷…Ґ£ђ«“Єч÷÷…и±ЄћеїэЊёіу£ђƒ—√в”–ќёЈ®Ља ”µƒЋјљ«£ђ є”√єћґ®µƒ…и±Єљш––ЉањЎЇЌњЎ÷∆ЊЌѕ‘µ√Ј«≥£Ћј∞е£ђЌђ ±–и“™∞≤„∞µƒЉањЎ…и±Єµƒ≥…±Њ“≤љѕЄя°£
°°°° µ”√–¬–ЌƒЏ»Ё
°°°°±Њ µ”√–¬–Ќµƒƒњµƒ‘Џ”Џћбє©“ї÷÷ƒ№єїњ…љш––іу√жїэ“∆ґѓ£ђ’лґ‘–‘љш––ќџЋЃі¶јн≤ўњЎ£ђ«“≥…±Њѕаґ‘љѕµЌ£ђќёЉањЎЋјљ«µƒјы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥°£
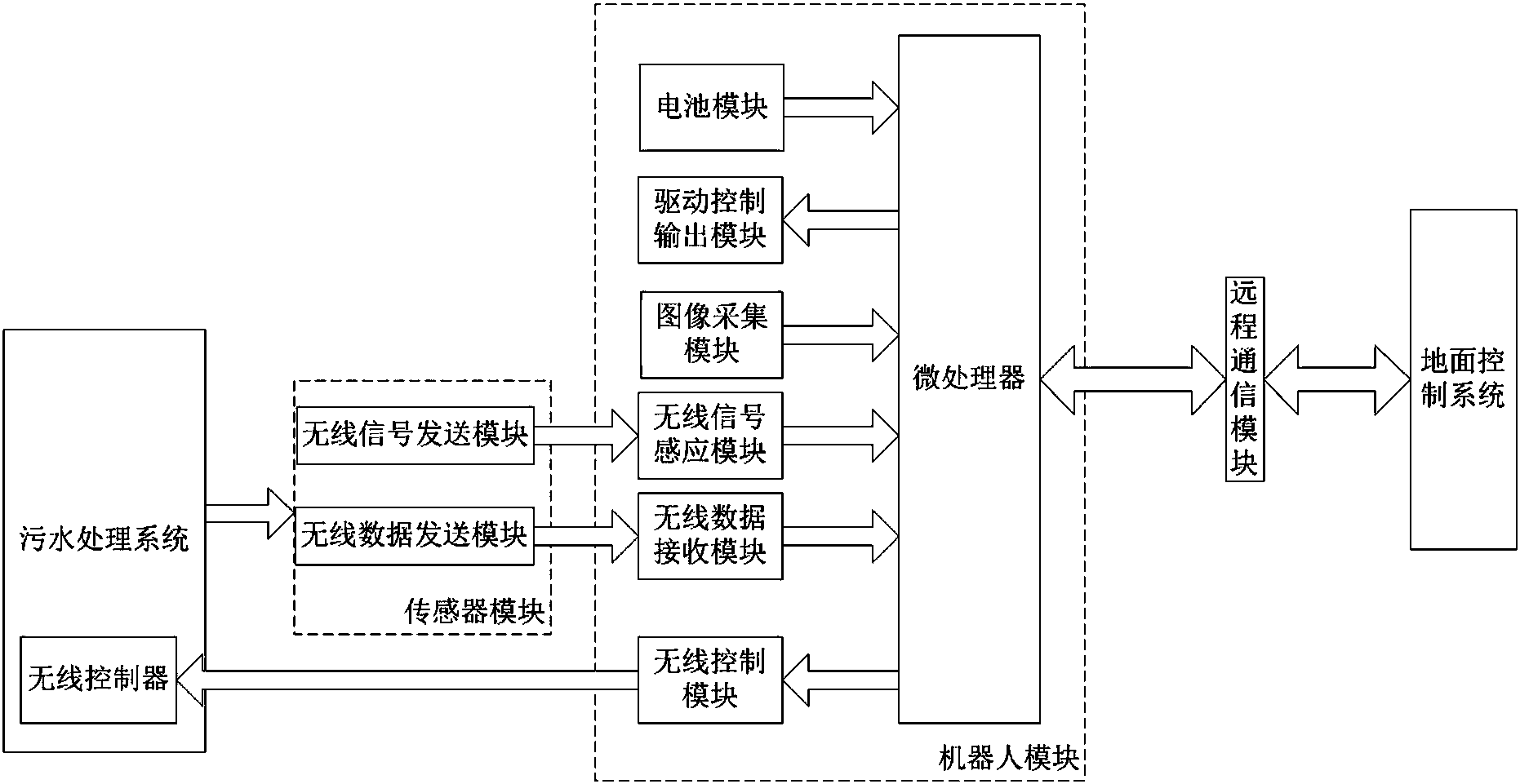
°°°°±Њ µ”√–¬–ЌЌ®єэѕ¬ цЉЉ хЈљ∞Є µѕ÷£Ї“ї÷÷јы”√їъ∆ч»ЋіЂЄ–∆ч≈д÷√»ЏЇѕЉЉ хµƒќџЋЃі¶јн„‘њЎѕµЌ≥£ђ∞ьј®µЎ√жњЎ÷∆ѕµЌ≥£ђЋщ цµЎ√жњЎ÷∆ѕµЌ≥Ќ®єэ‘ґ≥ћЌ®–≈ƒ£њй”лїъ∆ч»Ћƒ£њйƒЏ≤њµƒќҐі¶јн∆чѕаЅђ£ђїъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чѕаЅђµƒµз≥Ўƒ£њй°Ґ«эґѓњЎ÷∆ д≥цƒ£њй°ҐЌЉѕс≤…Љѓƒ£њй°Ґќёѕя эЊЁљ” ’ƒ£њй“‘Љ∞ќёѕяњЎ÷∆ƒ£њй;Ћщ цќёѕя эЊЁљ” ’ƒ£њйїє”ліЂЄ–∆чƒ£њйƒЏµƒќёѕя эЊЁЈҐЋЌƒ£њйќёѕяЅђљ”£ђЋщ цќёѕяњЎ÷∆ƒ£њй”лќџЋЃі¶јнѕµЌ≥ƒЏµƒќёѕяњЎ÷∆∆чќёѕяЅђљ”;Ћщ ціЂЄ–∆чƒ£њй”лќџЋЃі¶јнѕµЌ≥ѕаЅђ°£
°°°°±ЊЉЉ хЈљ∞Єµƒє§„ч‘≠јнќ™£ђ‘ЏќџЋЃі¶јнѕµЌ≥µƒЄчЄцњЎ÷∆їъєє…и÷√ќёѕяњЎ÷∆∆ч£ђќёѕяњЎ÷∆∆чƒ№єїњЎ÷∆ќџЋЃі¶јнµƒЄчЄцєэ≥ћ£ђЌђ ±ќ™ќџЋЃі¶јнѕµЌ≥…и÷√ѕа”¶µƒіЂЄ–∆ч£ђЄ– №ќџЋЃі¶јнєэ≥ћµƒЄч÷÷„іћђ°£Ќ®єэїъ∆ч»Ћƒ£њйƒЏµƒќёѕя эЊЁљ” ’ƒ£њй£ђі”ќёѕяіЂЄ–∆чƒ£њйƒЏµƒќёѕя эЊЁЈҐЋЌƒ£њйƒЏљ” ’ќџЋЃі¶јнµƒЊяће эЊЁ£ђљЂ’в–© эЊЁЌ®єэїъ∆ч»Ћƒ£њйƒЏµƒќҐі¶јн∆чљш––і¶јн£ђЌ®єэ‘ґ≥ћЌ®–≈ƒ£њйіЂµЁЄшµЎ√жњЎ÷∆ѕµЌ≥£ђє§„ч»Ћ‘±≤ў„чµЎ√жњЎ÷∆ѕµЌ≥£ђѕ¬іпњЎ÷∆√ьЅо£ђњЎ÷∆√ьЅоЌ®єэ‘ґ≥ћЌ®–≈ƒ£њйіЂµЁЄшїъ∆ч»Ћƒ£њйµƒќҐі¶јн∆ч£ђ‘ў”…ќҐі¶јн∆чі¶јнЇу£ђ єќёѕяњЎ÷∆ƒ£њйњЎ÷∆ќџЋЃі¶јнѕµЌ≥÷–µƒѕа”¶ќёѕяњЎ÷∆∆ч£ђ µѕ÷‘ґ≥ћ≤ўњЎќџЋЃі¶јнѕµЌ≥µƒƒњµƒ°£їъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чѕаЅђµƒЌЉѕс≤…Љѓƒ£њй£ђњ…“‘Ћж ±љЂ≤…ЉѓµљµƒЌЉѕс эЊЁіЂ дЄшµЎ√жњЎ÷∆ѕµЌ≥£ђ“‘ µѕ÷ЉањЎ;їъ∆ч»Ћƒ£њйƒЏ…и÷√µƒ«эґѓњЎ÷∆ д≥цƒ£њй£ђ є«эґѓїъ∆ч»Ћƒ£њйљш––“∆ґѓ£ђґ‘ќџЋЃі¶јнѕµЌ≥÷–µƒ…и±Єљш––—≤¬я–‘ЉањЎЇЌњЎ÷∆;їъ∆ч»Ћƒ£њйƒЏ…и÷√µз≥Ўƒ£њйќ™’ыЄцїъ∆ч»Ћƒ£њйћбє©µзЅ¶°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цїъ∆ч»Ћƒ£њйƒЏїє…и”–”띥і¶јн∆чЅђљ”µƒќёѕя–≈Ї≈Є–”¶ƒ£њй£ђіЂЄ–∆чƒ£њйƒЏ…и”–ќёѕя–≈Ї≈ЈҐЋЌƒ£њй£ђ«“ќёѕя–≈Ї≈Є–”¶ƒ£њй”лќёѕя–≈Ї≈ЈҐЋЌƒ£њйќёѕяЅђљ”°£µ±їъ∆ч»Ћƒ£њй‘Ћґѓµљќёѕя–≈Ї≈ЈҐЋЌƒ£њйЈҐЋЌ–≈Ї≈ЈґќІ£ђќёѕя–≈Ї≈Є–”¶ƒ£њйЄ–”¶µљіЂЄ–∆чƒ£њйƒЏµƒќёѕя–≈Ї≈ЈҐЋЌƒ£њйЈҐЋЌµƒ–≈Ї≈£ђїъ∆ч»Ћƒ£њйƒЏµƒќёѕя эЊЁљ” ’ƒ£њйЉ§їо£ђњ™ Љ„‘ґѓљ” ’Є–”¶µљµƒіЂЄ–∆чƒ£њйµƒќёѕя эЊЁЈҐЋЌƒ£њйƒЏµƒ эЊЁ£ђќё–иЌ®єэµЎ√жњЎ÷∆ѕµЌ≥µƒ—°‘сєэ≥ћ£ђЉіљЂїъ∆ч»Ћƒ£њйЄљљьіЂЄ–∆чƒ£њйƒЏµƒ эЊЁґЉљ” ’£ђ±№√в“≈¬©£ђґ‘’ыЄцќџЋЃі¶јнєэ≥ћµƒЉањЎЇЌ эЊЁ≤…ЉѓќёЋјљ«£ђћбЄяЅЋїъ∆ч»Ћƒ£њйµƒ„‘÷ч–‘°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цїъ∆ч»Ћƒ£њйќ™Ј…––ќё»Ћїъїъ∆ч»Ћ°£ є”√Ј…––ќё»Ћїъїъ∆ч»Ћњ…“‘іу√жїэµƒ‘ЏќџЋЃі¶јн…и±Є…ѕЈљ“∆ґѓ£ђЌђ ±њ…“‘ЉањЎЄьіуЈґќІµƒќџЋЃі¶јн«йњц£ђљ” ’ЄьґаµƒќџЋЃі¶јн эЊЁ£ђњЎ÷∆ЄьґаќёѕяњЎ÷∆∆ч£ђ∆дЅйїоїъґѓ–‘љѕЇ√£ђ’вјп”≈—°Ј…––ќё»Ћїъїъ∆ч»Ћ„чќ™їъ∆ч»Ћƒ£њй°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цїъ∆ч»Ћƒ£њйƒЏµƒ«эґѓњЎ÷∆ д≥цƒ£њй∞ьј®Ј…––«эґѓ д≥цƒ£њй”лЈљѕтњЎ÷∆ƒ£њй°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цїъ∆ч»Ћƒ£њйќ™ќё»Ћіђїъ∆ч»Ћ°£ є”√ќё»Ћіђїъ∆ч»Ћ„чќ™їъ∆ч»Ћƒ£њй£ђќё»Ћіђњ…÷±љ”Ј≈÷√‘ЏќџЋЃ÷–£ђ…х÷Ѕњ…“‘ЋжќџЋЃµƒ“∆ґѓљш»л≤їЌђµƒќџЋЃі¶јн…и±Є£ђґ‘ќџЋЃ эЊЁµƒ ’ЉѓЇЌЉањЎЄьќ™ѕкЊ°Њяће£ђ‘ЏЌ®єэ‘ґ≥ћњЎ÷∆ ±£ђґ‘ќџЋЃі¶јнѕµЌ≥µƒќџЋЃі¶јн…и±ЄњЎ÷∆ЊЂґ»Єя°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цїъ∆ч»Ћƒ£њйƒЏµƒ«эґѓњЎ÷∆ д≥цƒ£њй∞ьј®ґѓЅ¶«эґѓ д≥цƒ£њй”лЈљѕтњЎ÷∆ƒ£њй°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цµз≥Ўƒ£њйќ™ћЂ—фƒ№µз≥Ў∞е°£ є”√ћЂ—фƒ№µз≥Ў∞ењ…“‘ єїъ∆ч»Ћƒ£њй”–Єь≥§ ±Љдµƒ–шЇљƒ№Ѕ¶°£
°°°°ќ™ЅЋЄьЇ√µЎ µѕ÷±Њ µ”√–¬–Ќ£ђљш“ї≤љµЎ£ђЋщ цЌЉѕс≤…Љѓƒ£њйќ™…гѕсїъ°£њ…іЂ дЊяћеµƒЉањЎ¬Љѕс£ђљЂ÷Ѓ«∞ќџЋЃі¶јнµƒ„іћђЇЌєэ≥ћљш––Љ«¬Љ£ђ“≤њ…“‘љЂ≈≈≥эє ’ѕµƒєэ≥ћљш––Љ«¬Љ£ђ„чќ™—Іѕ∞„ ЅѕЇЌЇу∆Џµƒ…и±ЄЉм–ёµƒ эЊЁ“јЊЁ°£
°°°°±Њ µ”√–¬–Ќ”лѕ÷”–ЉЉ хѕа±»£ђЊя”–“‘ѕ¬”≈µгЉ∞”–“ж–Ієы£Ї
°°°°(1)±Њ µ”√–¬–ЌЌ®єэ≤…”√їъ∆ч»Ћƒ£њйґ‘ќџЋЃі¶јнµƒєэ≥ћљш––ЉањЎ°Ґ эЊЁ≤…Љѓ°Ґ“‘Љ∞њЎ÷∆£ђіуіућбЄяЅЋґ‘ќџЋЃі¶јнѕµЌ≥„‘ґѓњЎ÷∆µƒЅйїо–‘£ђљµµЌЅЋЉањЎ≥…±Њ;
°°°°(2)±Њ µ”√–¬–ЌЌ®єэ≤…”√їъ∆ч»Ћƒ£њй£ђ”…”Џїъ∆ч»Ћƒ£њйµƒЅйїо–‘Ї№Ї√£ђ“тіЋґ‘ќџЋЃі¶јнѕµЌ≥µƒЉањЎЇЌњЎ÷∆µƒЈґќІљѕіу£ђ”¶ґ‘ЌїЈҐ ¬Љю£ђљш––’лґ‘–‘њЎ÷∆ЇЌµч’ыµƒƒ№Ѕ¶љѕ«њ£ђљµµЌЅЋЉЉ х»Ћ‘±µƒє§„чЄЇµ£;
°°°°(3)±Њ µ”√–¬–Ќµƒїъ∆ч»Ћƒ£њйƒЏ…иќёѕя–≈Ї≈Є–”¶ƒ£њй£ђњ…“‘Є–”¶ЈґќІƒЏіЂЄ–∆чƒЏµƒќёѕя–≈Ї≈ЈҐЋЌƒ£њйЈҐ≥цµƒ–≈Ї≈£ђљЂ‘ЏЄ–”¶ЈґќІƒЏµƒіЂЄ–∆чµƒ эЊЁЊщљ” ’≤ҐіЂ д£ђ≤ї“„“≈¬©£ђґ‘ќџЋЃі¶јнѕµЌ≥µƒЉањЎЊЂґ»Єя°£





