
申请日2014.05.12
公开(公告)日2014.11.05
IPC分类号C05F3/06; C02F11/12
摘要
本发明公开了一种自动处理污泥的移动机器人系统。它包括机械部分、控制系统部分。所述的机械部分包含一个具有运动功能的机器人,机器人前后都有翻地的犁,机器人后部还有一个转向装置,机器人中间有个工作切换装置;控制系统包括上位机、车载计算机、传感器、无线模块、PLC控制器、接触器,上位机起到编程、调试、记录、发送指令的作用,车载计算机负责路径规划,上位机通过无线模块和PLC控制器实现通讯,PLC控制器作为处理器核心单元接收传感器发送的信号,识别、处理再将动作信号发送到各个电机的接触器控制机器人行走,本发明采用的动力源是电能,可以保证机器人工作的连续性,本发明可以实现机器人的完全自主移动,节省了人力、物力和财力。
权利要求书
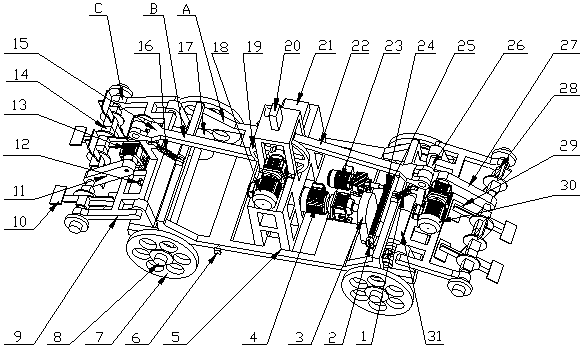
1.一种用于污泥自动处理的移动机器人系统,包括机械部分和控制系统;其特征在于:所述机械部分包括车体(A)、工作切换装置(B)和工作装置(C)三部分,所述工作切换装置(B)通过其中的一个飞盘(19)和车体(A)中的一个支架(5)相连,而通过其中的一个前拉杆(15)和一个后拉杆(22)分别和工作装置(C)上的一个前犁支架(9)和一个后犁支架(26)相连;所述工作装置(C)的前犁支架(9)和后犁支架(26)和车体(A)中的前后端支座相铰连,能够实现翻地、行走、转向功能;控制系统由上位机控制系统(D)和车载控制系统(E)组成;所述上位机控制系统(D)是:一个上位机(D1)和一个无线模块甲(D2)连接;所述车载控制系统(E)的结构是:一个无线模块乙(E1)和一个PLC控制器乙(E2)连接,上位机通过无线模块和PLC控制器乙(E2)实现通讯,起到编程、调试、记录和发送指令的作用;一个车载计算机(E3)嵌入在车体上和PLC控制器乙(E2)连接负责路径规划,传感器(E5)装在车体上也和PLC控制器乙(E2)连接作为模拟信号的检测输入;三个接触器甲、乙、丙(E6、E7、E8)一端和PLC控制器乙(E2)连接,另一端分别经热继电器甲、乙、丙(E9、E10、E11)和行走电机(E12)、转向电机(E12)及翻地电机(E14)连接;传感器(E5)将检测到的信号发送到PLC控制器乙(E2),PLC控制器乙(E2)经过识别、处理再将动作信号发送到各个电机(E12、E13、E14)的接触器(E6、E7、E8)智能地控制机器人的行走、翻地、转向,同时实现机器人的定位、避障、识别功能,实现机器人真正意义上的自动化和智能化。
2.根据权利要求1所述的用于污泥自动处理的移动机器人系统,其特征在于:所述传感器(E5)包括:定位功能方面的有一个GPS模块(21)和一个增量式光学编码器(17),所述GPS模块(21)放在车体(A)机架上,实现机器人的粗定位,增量式光学编码器(17)装在机器人前轮轴上,通过和GPS模块(21)协作实现机器人精确定位;避障功能方面的有一个超声波传感器(12),通过检测与障碍物的距离实现避障功能;检测功能方面的有一个视觉传感器(20)和一个湿度传感器(6),视觉传感器(20)装在车体机架的最上端,通过拍摄污泥的局部图像去辨别污泥的颜色,控制器根据污泥颜色控制机器人的运动避免重复工作,湿度传感器(6)装在车体的两侧,通过检测污泥的含水量进一步判断污泥的翻转情况。
3.根据权利要求1所述的用于污泥自动处理的移动机器人系统,其特征在于:所述车体(A)包括车架(5)、四个车轮(7)、前轮轴(8)、驱动电机(4)、转向电机(23)、驱动传动装置(3)、万向节(2)、后轮轴(31)、转向齿轮(24)和转向齿条(25),所述前后四个车轮(7)分别装在前轮轴(8)和后轮轴(31)上,前轮轴(8)和后轮轴(31)装在车架(5)前后端部上,驱动电机(4)和驱动传动装置(3)相连,驱动电机(4)通过驱动传动装置(3)里面齿轮啮合将动力传递到后轮轴(31)上,机器人通过后轮驱动行走;同时转向电机(23)与转向齿轮(24)相连,转向齿轮(24)又与转向齿条(25)啮合,转向齿条(25)与万向节(2)相连,万向节(2)又连到后轮轴(31)上,转向电机(23)控制后轮轴(31)的转向。
4.根据权利要求3所述的用于污泥自动处理的移动机器人系统,其特征在于:所述工作切换装置(B)包括飞盘(19)、前拉杆(15)、后拉杆(22)、驱动电机(18)、前缓冲弹簧(16)和后缓冲弹簧(1),所述飞盘(19)和驱动电机(18)相连装在车体支架(5)上,前拉杆(15)和后拉杆(22)一端装在飞盘(19)上,一端分别和前犁支架(9)、后犁支架(26)相连,前缓冲弹簧(16)、后缓冲弹簧(1)一端分别连在前犁支架(9)、后犁支架(26)上,另一端连在车体支架(5)上,起到缓冲保护的作用;当犁需要工作时,驱动电机(18)带动飞盘(19)顺时针转动,前犁支架(9)和后犁支架(26)放下,前犁后犁开始旋转工作。
5.根据权利要求1所述的用于污泥自动处理的移动机器人系统,其特征在于:所述工作装置(C)包括前犁减速机(13)、后犁减速机(30)、前犁传动装置(11)、后犁传动装置(27)、前犁支架(9)、后犁支架(26)、前转动轴(14)、后转动轴(28)、前犁(10)和后犁(29),所述前犁(10)和后犁(29)分别装在前转动轴(14)、后转动轴(28)上,前转动轴(14)、后转动轴(28)分别装在前犁支架(9)、后犁支架(26)上,前犁支架(9)和后犁支架(26)装在车体支架(5)上,前犁减速机(13)和后犁减速机(30)分别通过前犁传动装置(11)和后犁传动装置(27)将动力传到前转动轴(14)和后转动轴(28)上带动前犁后犁工作。
说明书
一种用于污泥自动处理的移动机器人系统
技术领域
本发明涉及一种用于污泥自动处理的移动机器人系统,用于对污水处理厂中污泥的自动处理,属于环保机器人领域。
背景技术
现有环保领域的污泥处理技术有卫生填埋、焚烧、干化制肥等。卫生填埋这种处置方法简单、易行、成本低,污泥又不需要高度脱水,适应性强。但是污泥填埋也存在一些问题,尤指填埋渗滤液和气体的形成。渗滤液是一种被严重污染的液体,如果填埋场选址或运行不当会污染地下水环境。填埋场产生的气体主要是甲烷,若不采取适当措施会引起爆炸和燃烧。以焚烧为核心的污泥处理方法是最彻底的污泥处理方法之一,它能使有机物全部碳化,杀死病原体,可最大限度地减少污泥体积;但是其缺点在于处理设施投资大,处理费用高,设备维护成本高,而且产生强致癌物质二恶英。污泥中含有丰富的氮磷钾、有机质等养分,是很好的有机肥,但污泥含水量高达80%,储运使用都非常困难,若处置不当又容易造成二次污染。干化制肥彻底解决了这一难题,将污泥铺在干化车间内,车间内的风扇通过配电柜自动控制,随时调控车间内的风速、湿度,自动翻泥机器人可以自动识别翻泥情况控制转向在污泥中来回行驶,可以代替人做重复、肮脏的工作,提高效率,节约资源,实现生态效益和经济效益双赢。
发明内容
本发明的目的在于解决现有的污泥干化制肥过程中重复、机械式的翻泥问题,而提供一种用于污泥自动处理的移动机器人系统。
为解决上述技术问题本发明的构思是:
一种用于污泥自动处理的移动机器人系统,从总体上主要由上位机控制系统和车载控制系统组成,上位机负责编程、监控、发送指令,车载控制系统包括PLC控制器、嵌入式计算机、传感器、车体、工作切换装置、工作装置。该系统可以实现移动机器人的行走、翻地、转向、定位、避障、识别功能。该机器人可以实现三种方式的工作模式:一是手动控制,我们可以根据手控盒的指令实现机器人的运动;二是前置路径规划,我们可以先在车载嵌入式计算机中规划好机器人的路径,当PLC控制器接收到前置路径规划模式工作方式时向计算机获取路径按预先设定好的路径行走;三是智能路径规划,我们把机器人放在工作车间,机器人根据传感器检测到的信号智能地识别判断行走方向和工作区域。
根据上述发明构思,本发明采用下述技术方案:
一种用于污泥自动处理的移动机器人系统,包括机械部分和控制系统;其特征在于:所述机械部分包括车体、工作切换装置和工作装置三部分,所述工作切换装置通过其中的一个飞盘和车体中的一个支架相连,而通过其中的一个前拉杆和一个后拉杆分别和工作装置上的一个前犁支架和一个后犁支架相连;所述工作装置的前犁支架和后犁支架和车体中的前后端支座相铰连,能够实现翻地、行走、转向功能;控制系统由上位机控制系统和车载控制系统组成;所述上位机控制系统是:一个上位机和一个无线模块甲连接;所述车载控制系统的结构是:一个无线模块乙和一个PLC控制器乙连接,上位机通过无线模块和PLC控制器乙实现通讯,起到编程、调试、记录和发送指令的作用;一个车载计算机嵌入在车体上和PLC控制器乙连接负责路径规划,传感器装在车体上也和PLC控制器乙连接作为模拟信号的检测输入;三个接触器甲、乙、丙一端和PLC控制器乙连接,另一端分别经热继电器甲、乙、丙和行走电机、转向电机及翻地电机连接;传感器将检测到的信号发送到PLC控制器乙,PLC控制器乙经过识别、处理再将动作信号发送到各个电机的接触器智能地控制机器人的行走、翻地、转向,同时实现机器人的定位、避障、识别功能,实现机器人真正意义上的自动化和智能化。
所述传感器包括:定位功能方面的有一个GPS模块和一个增量式光学编码器,所述GPS模块放在车体机架上,实现机器人的粗定位,增量式光学编码器装在机器人前轮轴上,通过和GPS模块协作实现机器人精确定位;避障功能方面的有一个超声波传感器,通过检测与障碍物的距离实现避障功能;检测功能方面的有一个视觉传感器和一个湿度传感器,视觉传感器装在车体机架的最上端,通过拍摄污泥的局部图像去辨别污泥的颜色,然后控制器根据污泥颜色(没翻的污泥经过风扇吹干后呈暗白色,刚刚翻过的污泥呈暗黑色)控制机器人的运动避免重复工作,湿度传感器装在车体的两侧,通过检测污泥的含水量(刚加工的污泥湿度大,未加工的污泥湿度小)进一步判断污泥的翻转情况。
所述车体由车架、四个车轮、前轮轴、驱动电机、转向电机、驱动传动装置、万向节、后轮轴、转向齿轮和转向齿条组成,所述前后四个车轮分别装在前轮轴和后轮轴上,前轮轴和后轮轴装在车架上,驱动电机和驱动传动装置相连,驱动电机通过驱动传动装置里面齿轮啮合将动力传递到后轮轴上,机器人通过后轮驱动行走;同时转向电机与转向齿轮相连,转向齿轮又与转向齿条啮合,转向齿条与万向节相连,万向节又连到后轮轴上,转向电机控制后轮轴的转向。
所述工作切换装置包括飞盘、前拉杆、后拉杆、驱动电机、前缓冲弹簧和后缓冲弹簧,飞盘和驱动电机相连装在车体支架上,前拉杆和后拉杆一端装在飞盘上,一端分别和前犁支架、后犁支架相连,前缓冲弹簧、后缓冲弹簧一端分别连在前犁支架、后犁支架上,另一端连在车体支架上,起到缓冲保护的作用;当犁需要工作时,驱动电机带动飞盘顺时针转动,前犁支架和后犁支架放下,前犁后犁开始旋转工作。
所述工作装置包括前犁减速机、后犁减速机、前犁传动装置、后犁传动装置、前犁支架、后犁支架、前转动轴、后转动轴、前犁和后犁,前犁和后犁分别装在前转动轴、后转动轴上,前转动轴、后转动轴分别装在前犁支架、后犁支架上,前犁支架和后犁支架装在车体支架上,前犁减速机和后犁减速机分别通过前犁传动装置和后犁传动装置将动力传到前转动轴和后转动轴上带动前犁后犁工作。
本发明与现有技术相比较,具有如下突出实质特征点和显著优点:
目前国内该领域还没有这种机器人,但是该机器人与农业生产中的旋耕机有很多相同点,与普通旋耕机相比,该机器人系统具有以下显著优点:首先,普通旋耕机使用的动力源是柴油机,而该机器人的动力源是电,这样就保证机器人工作的持续性,不用担心机器人移动过程中失去动力;其次,普通旋耕机需要人去操作,行走路线根据人的意志而确定,而该机器人完全可以自主移动,节省了人力、物力、财力。





