
申请日2013.12.23
公开(公告)日2014.04.09
IPC分类号G05B19/418; C02F1/52
摘要
一种基于机器视觉的新型水处理方法及其装置,利用机器视觉技术,将两台高精度工业摄像机与高性能工业计算机相连接组成水处理实时检测控制装置。该装置采用双池采样,工业计算机中安装自主设计的实验相关算法与工具,构成一个混凝投药闭环串级自动控制系统。其核心是图像采集和处理层,采用多模块化处理;在数据融合层对其进行多维数据融合与实验结果对比分析,最后根据结论,建立投药量与原水水质、混凝剂、絮凝池絮体等效粒径与数量,沉淀池絮体沉速、滤前水水质参数关系的多源数据融合的数学模型;在串级闭环控制层实现系统自动控制混凝剂的投加量,以达到保证供水水质,减少混凝剂的消耗量,降低制水成本的目的。本发明适用于水厂的水处理。
权利要求书
1.一种基于机器视觉的新型水处理方法,其特征在于,所述方法的具体流程为:
(1)硬件设备层,采用双池采样,摄像机放置与连接;将两台工业摄像机分别固定于絮凝池和沉淀池的最佳位置,固定之前在控制室内将两台摄像机与工业计算机相连接组成实时监测控制装置;
(2)图像采集和处理层进行图像采集,用专门的图像处理算法进行图像灰度增强,用top-hat形态学滤波抑制图像噪声;
(3)将预处理后的图像用开运算和闭运算解决图像中絮体粘连和边缘不齐通过检测识别模块计算出絮体的数量和等效粒径,通过跟踪模块得出絮体的沉降速度;
(4)在数据融合层,结合原水水质、混凝剂、絮凝池絮体的等效粒径与数量,沉淀池絮体沉速和滤前水水质参数,通过数据融合模块进行处理得到反映水处理效果的唯一特征参数;
(5)在串级闭环控制层,根据该特征量实现系统自动控制混凝剂的投加;然后返回第二步,直到达到我们要求的水质为止。
2.根据权利要求1所述的一种基于机器视觉的新型水处理方法,其特征在于,所述双池采样,即絮凝池和沉淀池各放置一台摄像机,然后将控制室内的计算机与两台摄像机相连接;根据絮凝池和沉淀池的体积和形状的不同,可将摄像机采取不同的位置在两个池中分别放置,用于不同实验数据研究;絮凝池摄像机的安放位置:絮凝池出口,絮凝池到沉淀池缓冲段;沉淀池摄像机的安放位置:沉淀池进水口,1/2池长,1/3池长处。
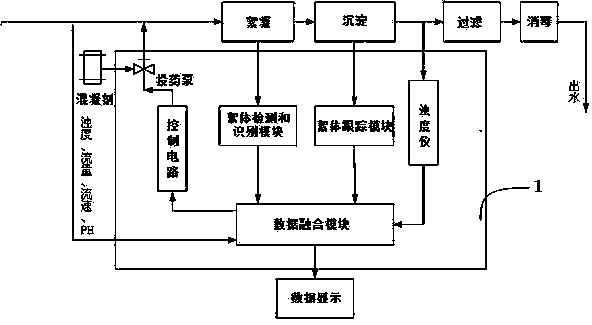
3.一种基于机器视觉的新型水处理装置,其特征在于,所述装置包括:硬件设备层,图像采集和处理层,数据融合层,串级闭环控制层;
所述硬件设备层的硬件设备主要包括模拟絮凝池,模拟沉淀池,工业摄像机两台,高性能工业计算机一台,千兆网线40米;模拟絮凝池和模拟沉淀池由管道相连接,两台工业摄像机分别安装在模拟絮凝池和模拟沉淀池内的中下部位置,在工业摄像机镜头前放置了照亮絮体并供摄像的灯箱;工业摄像机通过千兆网线与设置在池外控制室的高性能计算机相连接;灯箱由电源线接至电源,由电源供电;
所述图像采集和处理层包括安装在计算机的絮体图像检测识别模块、絮体跟踪模块;所述絮体图像检测识别模块,利用絮凝池摄像机的图像检测数据,以三帧图像差分、粒子群优化增强大津法处理所得絮体图像,即将絮凝池摄像机采集的图像实时传输到计算机中,然后利用图像处理系统的检测和识别模块,对絮体图像进行处理,得出清晰的背景参考帧,进而对背景参考帧图像进行处理,得出所需的絮体数量和等效粒径参数;所述絮体跟踪模块,利用沉淀池摄像机的图像检测数据,针对絮体跟踪存在运算时间、存储空间方面的巨大开销和絮体在沉淀过程中发生聚合、交叉、重叠而引起跟踪丢失的问题,引用特定絮体跟踪算法结合絮体运动的连续性特点及运动轨迹方程来确定目标的位置;即将沉淀池摄像机采集的图像实时传输到计算机中,然后利用图像处理系统的跟踪监测模块,对絮体图像进行处理,从而得出絮体的沉降速度参数;
所述数据融合层,利用经过图像处理系统处理后的絮凝池和沉淀池数据,建立投药量与原水水质、混凝剂、絮凝池絮体等效粒径与数量,沉淀池絮体沉速、滤前水水质参数关系的多源数据融合的数学模型;
所述串级闭环控制层,构建以沉淀池的沉降速度为主控,以絮凝池的相关参数为辅控,以原水水质参数为前馈,滤前水浊度为反馈的串级闭环控制系统。
说明书
一种基于机器视觉的新型水处理方法及其装置
技术领域
本发明涉及一种基于机器视觉的新型水处理方法装置及其方法,属于水处理研究领域。
背景技术
随着生活水平的不断提高,人们对饮用水水质的要求也越来越高,无论原水取自何种水源,都不同程度地含有许多杂质,包括携带的悬浮物、胶体、溶解物等,水处理的任务就是去除原水中的各种杂质,使之达到饮用水标准。因此如何对原水进行有效的检测和处理,是我们目前水处理过程中面对的主要问题。
前期的研究表明:现有的机器视觉絮体检测采样点均设在絮凝池末端缓慢水流处,流速2.5mm/s,比实际沉淀池水平流速10-25m/s小的多,采样代表性不足,基于此,絮凝池和沉淀池双池采样点的确定作为絮体检测方法研究的一个重要组成部分。
以前的处理方法是单模块解决方案,对图像进行相同的处理后,再进行识别和跟踪操作,针对性不强,操作过程复杂,实验结果误差大。
发明内容
本发明的目的是:针对絮凝过程极其复杂并与诸多因素相关的现状,本发明公开一种基于机器视觉的新型水处理装置与方法,该装置根据获得相对精确的检测数据,通过不同系统模块数据进行融合,得出反馈数据,控制投药量。
本发明的技术方案是:一种基于机器视觉的水处理方法,在基于机器视觉技术的基础上,采用双池采样法,将两台高精度工业摄像机与高性能工业计算机相连接组成实时水处理检测控制装置;利用工业计算机将检测到的实验数据和实验结果保存在计算机中,对其进行多维数据融合与实验结果对比分析,最后根据结论,建立投药量与原水水质、混凝剂、絮凝池絮体等效粒径与数量,沉淀池絮体沉速、滤前水水质参数关系的多源数据融合的数学模型,实现系统自动控制混凝剂的投加量以达到保证供水水质,减少混凝剂的消耗量,达到降低制水成本的目的。
本发明的双池采样,即絮凝池和沉淀池各放置一台摄像机,然后将控制室内的计算机与两台摄像机相连接。
本发明根据絮凝池和沉淀池的体积和形状的不同,可将摄像机采取不同的位置在两个池中分别放置,用于不同实验数据研究。絮凝池摄像机的安放位置:絮凝池出口,絮凝池到沉淀池缓冲段;沉淀池摄像机的安放位置:沉淀池进水口,1/2池长,1/3池长处。
本发明水处理装置包括:硬件设备层,图像采集和处理层,数据融合层、串级闭环控制层。
硬件设备层的硬件设备主要包括模拟絮凝池,模拟沉淀池,工业摄像机两台,高性能计算机一台,千兆网线40米。模拟絮凝池和模拟沉淀池由管道相连接,两台工业摄像机分别安装在模拟絮凝池和模拟沉淀池内的中下部位置,在工业摄像机镜头前放置了照亮絮体并供摄像的灯箱;工业摄像机通过千兆网线与设置在池外控制室的高性能计算机相连接;灯箱由电源线接至电源,由电源供电。
图像采集和处理层包括安装在计算机的絮体图像检测识别模块、絮体跟踪模块和数据融合模块。
絮体图像采集和处理层,利用絮凝池摄像机的图像检测数据,以三帧图像差分,粒子群优化增强大津法等处理所得絮体图像,即将絮凝池摄像机采集的图像实时传输到计算机中,然后利用图像处理系统的检测和识别模块,对絮体图像进行处理,得出清晰的背景参考帧,进而对背景参考帧图像进行处理,得出我们所需的絮体数量和等效粒径等参数。
絮体跟踪模块,利用沉淀池摄像机的图像检测数据,针对絮体跟踪存在运算时间,存储空间方面的巨大开销和絮体在沉淀过程中发生聚合、交叉、重叠而引起跟踪丢失等问题,引用特定絮体跟踪算法结合絮体运动的连续性特点及运动轨迹方程来确定目标的位置;将沉淀池摄像机采集的图像实时传输到计算机中,然后利用图像处理系统的跟踪监测模块,对絮体图像进行处理,从而得出絮体的沉降速度等参数。
数据融合层,针对水处理絮凝过程复杂,影响因素多,具有非线性、大滞后的特点,利用差分进化算法(DE)建立水处理混凝过程中,投药量与原水水质(浊度、水温、PH值、有机物含量等)、混凝剂、絮凝池絮体等效粒径与数量、沉淀池絮体沉速、滤前水质等参数关系的多源融合的数学模型。在絮体图像处理系统中,通过输入若干参数,得出我们所需要的输出数据:投药量。
串级闭环控制层,基于水处理絮凝过程中多源数据融合的控制模型,编写软件,利用浊度仪、流量计、PH计、摄像机、图像采集卡、工控机等硬件,构建以沉降池的沉降速度为主控,以絮凝池的相关参数为辅控,以原水水质参数为前馈,滤前水浊度为反馈的闭环串级控制系统,通过仿真与实验验证对系统进行完善,并把研究成果应用于水处理混凝过程投药自动控制生产实践。
根据上述的多源输入参数形成一个唯一的输出控制特征量(投药量),用以驱动投药泵实现对混凝剂投加的准确自动控制,从而构成一个混凝投药闭环串级自动控制系统。
本发明一种基于机器视觉的新型水处理方法的具体流程为:
(1)双池采样,摄像机放置与连接;将两台工业摄像机分别固定于絮凝池和沉淀池的最佳位置,在固定之前在控制室内将摄像机与计算机相连接;
(2)将双池采集到的图像数据同步到专门的计算机图像处理系统,对图像做一些前奏处理,用专门的图像处理算法进行图像灰度增强,用top-hat形态学滤波抑制图像噪声,用开运算和闭运算处理图像中絮体粘连和边缘不齐;
(3)将处理后的图像分别用系统相应的图像处理模块进行分析,在检测识别模块得出絮体的数量和等效粒径,在跟踪模块得出絮体的沉降速度;
(4)结合投药量与原水水质、混凝剂、絮凝池絮体的等效粒径与数量,沉淀池絮体沉速、滤前水水质参数,应用系统的数据融合、层进行处理得出唯一的输出控制投药量;
(5)通过闭环控制层,根据唯一输出控制投药量自动控制药量的添加,然后返回第一步,直到达到我们要求的水质为止。
本发明的有益效果是,本发明在双摄像机的情况下,分别设置检测和识别模块,跟踪模块,对不同模块的图像进行个性化处理,在絮体的检测和识别模块为了保证测量絮体的精确度,形态学滤波采用先开后闭的运算。在絮体的跟踪模块为了能够更加有效的进行絮体跟踪,形态学滤波采用先膨胀后闭运算的操作。从而更能精确和有效的得出我们所需要的检测数据。通过多模块得出的数据,以沉淀池中检测获取的沉降速度为主控,絮凝池中检测获取的等小粒径,数量等参数为辅控,以原水水质参数为前馈、滤前水浊度为反馈,构建一个既考虑原水水质变化的实时性又考虑滤前水浊度的滞后性的混凝投药闭环串级控制系统。
本发明可大大节约水处理的运行成本,实现水处理的实时监控和自动控制。本发明适用于水厂的水处理。





