
����������2018.03.09
��������(����)��2018.06.22
����IPC�����B25J9/16
����ժҪ
�����������漰һ����ˮ����������ϵͳ�����������˱��塢ͨ��ϵͳ���������ϵͳ;�������ϵͳͨ��ͨ��ϵͳ������˱�������;ͨ���������ϵͳ�·�����ָ������˱��壬�����˱��彫������ݼ�����״̬���ݴ��ص������ϵͳ���������Ļ����˼��֮ǰ����Ҫ�Ÿɹܵ��ڲ���ˮ����˿���������ʱ����м�⣬�������Ч�ʡ�
��
����Ȩ��Ҫ����
����1.һ����ˮ����������ϵͳ�����������ڣ����������˱��塢ͨ��ϵͳ���������ϵͳ;�������ϵͳͨ��ͨ��ϵͳ������˱�������;ͨ���������ϵͳ�·�����ָ������˱��壬�����˱��彫������ݼ�����״̬���ݴ��ص������ϵͳ;�����˱������ˮ�����塢����ģ�顢��λģ�顢��������ģ������ݲɼ�ģ��;����ģ�顢��λģ�顢��������ģ������ݲɼ�ģ�����װ��ˮ������;����ģ������ˮ�������н�����λģ������ˮ�������ڹ����еĺ���λ�Ϳռ䶨λ�����ݲɼ�ģ�����ڲɼ������ڲ�������γɲɼ��ź�;��������ģ�����ڽ��պʹ������ݲɼ�ģ��ɼ������źţ���ת��Ϊ����ָ�
����2.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ�����ˮ������Ϊ���ͻ�Ƥ����;��������ģ��Ϊˮ��������������ʽ�ƽ�����
����3.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ�������λģ��ͨ��������������ģ����״���к���λ;ͨ��������»�����վ���пռ䶨λ��
����4.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ�������������ģ������ͼ�����Ϳ��ư忨��
����5.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�������������������ݲɼ�ģ�������ѧͼ��ģ�顢����ģ�顢�����������Һ�����������һ�����;������ѧͼ��ģ��Ϊ��ҵ�����CCTV���ϵͳ�����ڲɼ�ˮ�����Ϲ��߱������;����ģ�����ڲɼ�ˮ�����¹��������
����6.����Ȩ��Ҫ��1������һ����ˮ ����������ϵͳ�����������������������ϵͳ����������������ʾ��������������
����7.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ������������������������ģ��������ݺ��Ŀ���ģ�顢��Ϣ����ģ�顢����ģ��;�������ݺ��Ŀ���ģ��ֱ�����Ϣ����ģ�飬��λģ�飬����ģ�鼰���ݲɼ�ģ�����ӡ�
����8.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ���������Դϵͳ;������Դϵͳ��﮵�ء�ȼ�ϵ�ء����ػ�ͨ��������������ⲿ��Դ����һ�֡�
����9. ����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ�������������ģ��ͨ���ض��㷨��������;�����ض��㷨������
����״̬���� X(k|k-1)=A�qX(k-1)+B�qU(K)+W(k)
�����۲ⷽ�� Z(k)=H�qX(k)+V(k)
����X=[s v]T��U=[0 a]T��Z=[s 0]T
��������sΪ�����˱���λ�ã�vΪ�����˱����ٶȣ�aΪ���Դ���������ļ��ٶ�;���ݾ���Ļ�е�ṹ�����г�����A��B��H��ͨ��ʵ��õ�״̬���̵�����W�Ͳ���ϵͳ������V;
����ͨ��״̬���̿��Լ����Ԥ��ֵX(k|k-1)��ͨ�������˱��嶨λģ����Ի�ȡ����ֵZ(k)��Ȼ��ͨ�����¹�ʽ�õ����Ż�����ֵ����ֵ��Ϊ�����˵�ǰ��λ��;
����X(k|k)= X(k|k-1)+Kg�q(Z(k)-H�qX(k|k-1))
��������KgΪ���������棬ͨ�����¹�ʽ���㣺
������ʽ�У�RΪ����ϵͳ��Э�������,
����Ϊ״̬���̵�Э�������;
����P(k|k-1)=A�qP(k-1|k-1) AT+Q
������ʽ��QΪ״̬���̵�Э�������;���յõ���k״̬�����ŵĹ���ֵX(k|k);
����ͬʱ����k״̬��X(k|k)��Э�������P(k|k)=(I-Kg�qH)P(k|k-1)��
����10.����Ȩ��Ҫ��1������һ����ˮ����������ϵͳ�����������ڣ�������������ģ��ͨ�����������㷨ʵ�ֻ����˱�����Ϲ���;�������������㷨�������������˶�������ͨ����λģ���ȡ��Χ�ϰ���ľ�����Ϣ���������˱���ǰ����������ϰ����Ҿ���С��ijһ����ֵʱ�����������˵�ǰ���������ƹ��ϰ��
����11.����Ȩ��Ҫ��3������һ����ˮ����������ϵͳ�����������ڣ����������״����λ�ķ����ǣ�
������ȡ�����˱���������������ڵĴ�ֱ���룬�Լ���Թ������ĵĺ����;
���������״��Թ̶�Ƶ�ʻ�ȡ��Χ�����ݣ��ܵ���ڵ��״����ݱ���Ϊ����ֱ�ߣ����״�����������������ֱ�����ݣ����������������һ�����㷨������ϳ�����ֱ�ߵķ��̣��ֱ�Ϊ��
��������A1��B1��C1��A2��B2��C2�Ƿ��̵�ϵ��;
���������˱����������ڵľ���Ϊ��
���������˱���ĺ����Ϊ����
����˵����
����һ����ˮ����������ϵͳ
������������
�����������漰һ�ּ��ϵͳ������˵��һ����ˮ����������ϵͳ��
������������
����������ˮ�����dz��е���Ҫ������ʩ֮һ�����ų��з�չ����ˮ�����İ�ȫ���������Ե�������Ҫ������ˮ�����Ĺ���Ҫ��Ҳ����ߡ��ڿ���⼼��Ϊ������ˮ�ܵ������й����ṩ�ɿ����ֶΣ�ͨ���ڿ������Լ�ʱ���ֹܵ��ĸ�ʴ�����𣬽ӿڴ�λ���ٻ����Ṹ�Ȳ���״������ʱ�����Ӷ������ܵ���ʹ�����ޡ�Ŀǰ�����ϵĹܵ��������˾�Ϊ��ʽ�ṹ��ʹ��ʱ��Ҫ�ѹܵ��ڵ�ˮ��ɣ����ǹܵ���ˮ�漰�Ĺ������dz��ƴ����������˼���IJ��㡣
������������
����Ϊ�˷����м������ڵ��������⣬�������ṩ��һ����ˮ����������ϵͳ����ϵͳ�������Ч�ʸߣ��������ȷ�ȸߣ����ҽ����˹�����Ա���Ͷ�ǿ�ȣ�����Ч���Ϲ�����Ա��������ȫ��
���������������¼�������ʵ�֣�
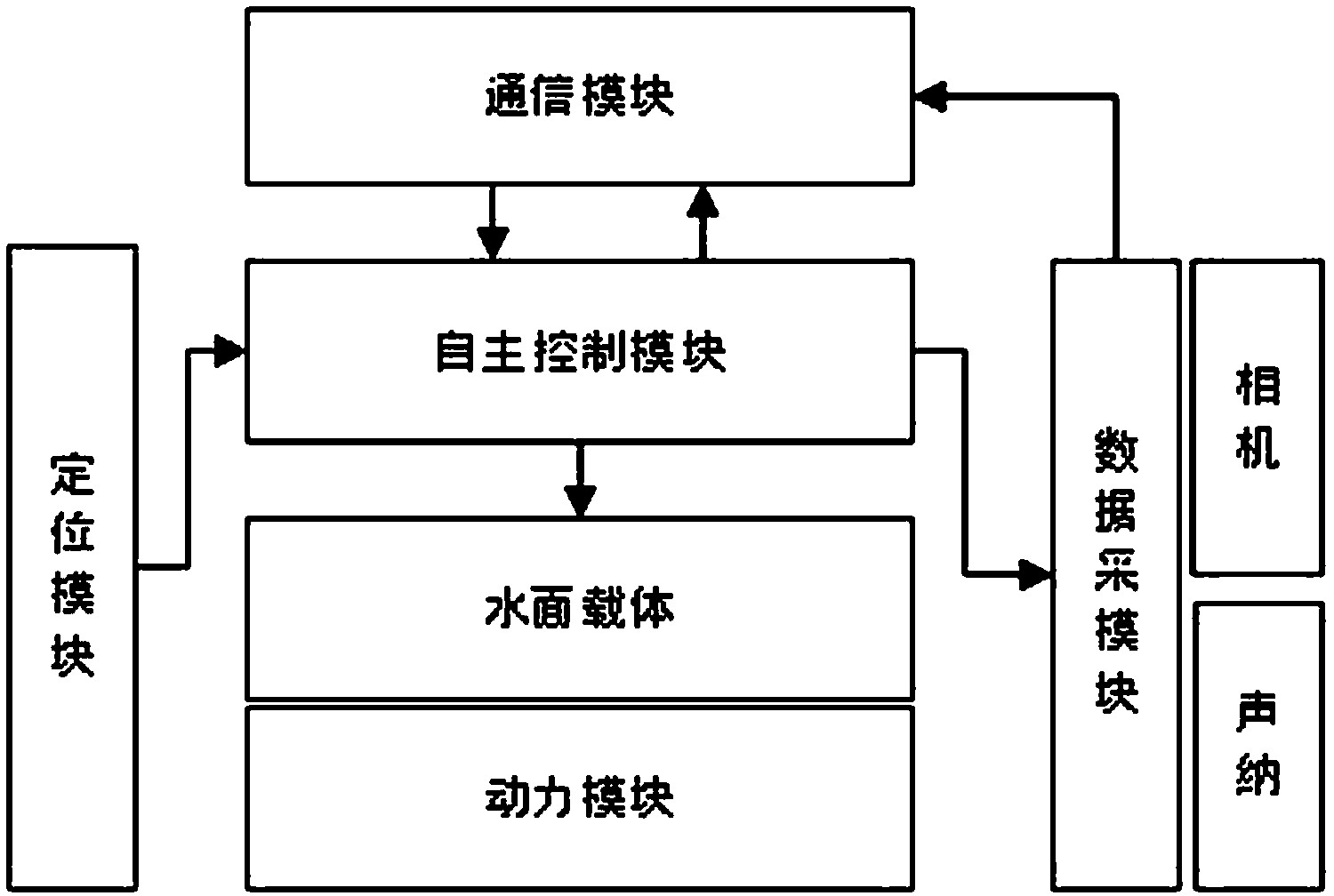
����һ����ˮ����������ϵͳ�����������˱��塢ͨ��ϵͳ���������ϵͳ;�������ϵͳͨ��ͨ��ϵͳ������˱�������;ͨ���������ϵͳ�·�����ָ������˱��壬�����˱��彫������ݼ�����״̬���ݴ��ص������ϵͳ;�����˱������ˮ�����塢����ģ�顢��λģ�顢��������ģ������ݲɼ�ģ��;����ģ�顢��λģ�顢��������ģ������ݲɼ�ģ�����װ��ˮ������;����ģ������ˮ�������н�����λģ������ˮ�������ڹ����еĺ���λ�Ϳռ䶨λ�����ݲɼ�ģ�����ڲɼ������ڲ�������γɲɼ��ź�;��������ģ�����ڽ��պʹ������ݲɼ�ģ��ɼ������źţ���ת��Ϊ����ָ�
������һ���ģ�����ˮ������Ϊ���ͻ�Ƥ����;��������ģ��Ϊˮ��������������ʽ�ƽ�����
������һ���ģ�������λģ��ͨ��������������ģ����״���к���λ;ͨ��������»�����վ���пռ䶨λ��
������һ���ģ�������������ģ������ͼ�����Ϳ��ư忨��
������һ���ģ��������ݲɼ�ģ�������ѧͼ��ģ�顢����ģ�顢�����������Һ�����������һ�����;������ѧͼ��ģ��Ϊ��ҵ�����CCTV���ϵͳ�����ڲɼ�ˮ�����Ϲ��߱������;����ģ�����ڲɼ�ˮ�����¹��������
������һ���ģ������������ϵͳ����������������ʾ��������������
������һ���ģ�������������ģ��������ݺ��Ŀ���ģ�顢��Ϣ����ģ�顢����ģ��;�������ݺ��Ŀ���ģ��ֱ�����Ϣ����ģ�飬��λģ�飬����ģ�鼰���ݲɼ�ģ�����ӡ�
������һ���ģ���������Դϵͳ;������Դϵͳ��﮵�ء�ȼ�ϵ�ء����ػ�ͨ��������������ⲿ��Դ����һ�֡�
������һ���ģ�������������ģ��ͨ���ض��㷨��������;�����ض��㷨������
����״̬���� X(k|k-1)=A�qX(k-1)+B�qU(K)+W(k)
�����۲ⷽ�� Z(k)=H�qX(k)+V(k)
����X=[s v]T��U=[0 a]T��Z=[s 0]T
��������sΪ�����˱���λ�ã�vΪ�����˱����ٶȣ�aΪ���Դ���������ļ��ٶ�;���ݾ���Ļ�е�ṹ�����г�����A��B��H��ͨ��ʵ��õ�״̬���̵�����W�Ͳ���ϵͳ������V;
����ͨ��״̬���̿��Լ����Ԥ��ֵX(k|k-1)��ͨ�������˱��嶨λģ����Ի�ȡ����ֵZ(k)��Ȼ��ͨ�����¹�ʽ�õ����Ż�����ֵ����ֵ��Ϊ�����˵�ǰ��λ��;
����X(k|k)= X(k|k-1)+Kg�q(Z(k)-H�qX(k|k-1))
����KgΪ���������棬ͨ�����¹�ʽ���㣺����P(k|k-1)=A�qP(k-1|k-1) AT+Q
������ʽ��QΪ״̬���̵�Э�������;���յõ���k״̬�����ŵĹ���ֵX(k|k);
����ͬʱ����k״̬��X(k|k)��Э�������P(k|k)=(I-Kg�qH)P(k|k-1)��
������һ���ģ�������������ģ��ͨ�����������㷨ʵ�ֻ����˱�����Ϲ���;�������������㷨�������������˶�������ͨ����λģ���ȡ��Χ�ϰ���ľ�����Ϣ���������˱���ǰ����������ϰ����Ҿ���С��ijһ����ֵʱ�����������˵�ǰ���������ƹ��ϰ��
������һ���ģ����������״����λ�ķ����ǣ�
������ȡ�����˱���������������ڵĴ�ֱ���룬�Լ���Թ������ĵĺ����;
���������״��Թ̶�Ƶ�ʻ�ȡ��Χ�����ݣ��ܵ���ڵ��״����ݱ���Ϊ����ֱ�ߣ����״�����������������ֱ�����ݣ����������������һ�����㷨������ϳ�����ֱ�ߵķ��̣��ֱ�Ϊ��
��������A1��B1��C1��A2��B2��C2�Ƿ��̵�ϵ��;
���������˱����������ڵľ���Ϊ��
���������м�����ȣ�������������Ч�����£�
�������еĹܵ������˼��֮ǰ��Ҫ�Ÿɹܵ��ڲ���ˮ��������ˮ��һ����Ҫ�ಿ����ϵĺƴ̣�������Ӱ�����������ˮ���������Ļ����˼��֮ǰ����Ҫ�Ÿɹܵ��ڲ���ˮ����˿���������ʱ����м�⣬�������Ч�ʡ�
����������ͨ���ض��㷨���������ںϣ���һ������˻�����ϵͳ�Ķ�λ���ȣ��Ӷ���ȷ�������ڲ�����ȱ�ݣ����Խ��и�Ч���������������⣬�û�����ϵͳ�����ɿ�����ȫ�����ͨ���˹����ĸ�ǿ�ȹ����ͼ�����IJ�ȷ�ԡ�





