
����������2001.11.16
��������(����)��2002.07.17
����IPC�����B01D24/22; B01D36/00
����ժҪ
������������˫���˳����ܻ�����ˮ����ϵͳ�����ɵ綯��/���������źͺ���ϵͳ��ɿ���ϵͳ����,�����˳ص�ˮͷ��ʧ������ʱ������в�����ʵ��˫���˳����ܻ�����ˮ����ϵͳ���˳ص�Ԫ�ϲ�����U�ν�ˮ������·����ˮ������·,�ڽ�ˮ������·����ˮ������·���ϲ����ô���缫�Լ��������ó�������������ƻ�������������ߵ�ѹ�����������հ������γɺ�,����ʹ��ˮ��������ˮ�������ʵ���˳صĽ�ˮ����ˮ���Զ����ơ���������˹��ֶ�����,�����Ǵ���ˮ���ɷֳɶ����Ԫ�˳صľ�ˮ��,���ܱ�֤ˮ�ʰ�ȫ������ķѴ���������������,�ɹ㷺��Ӧ��˫���˳ء�����ָ������ϡ����⼯ˮ��ƹ淶��GBJ 13-86�и���涨ָ���Ҫ��
��������Ҫ���
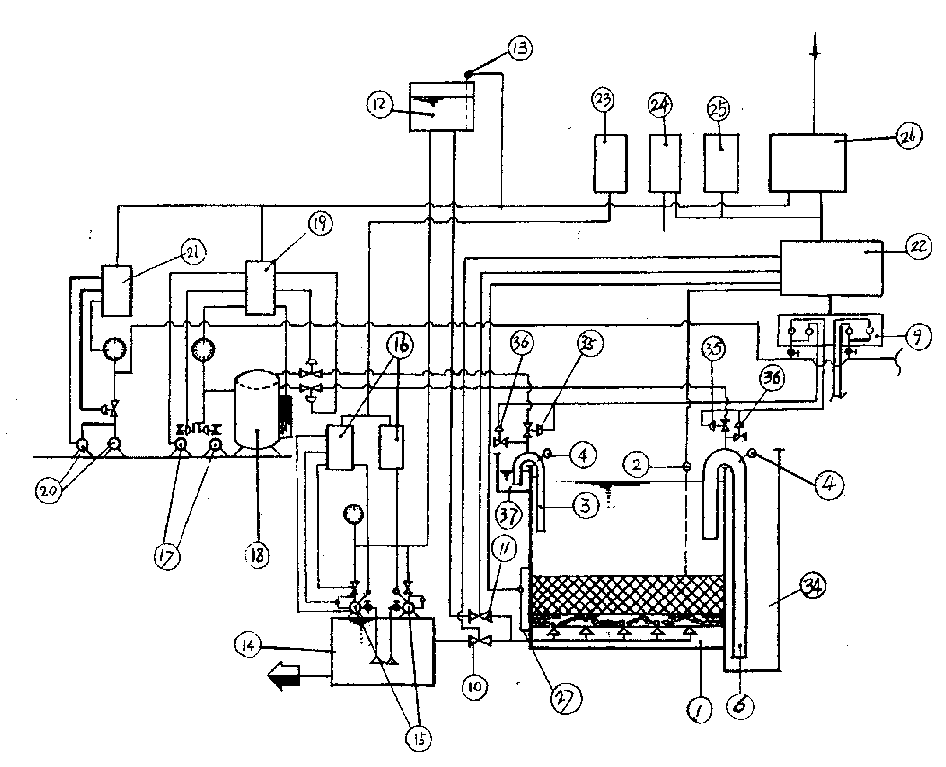
����1��һ��˫���˳����ܻ�����ˮ����ϵͳ���������������ɵ綯��/������ ���źͺ���ϵͳ��ɿ���ϵͳ���ȣ����������ɸ��˳ص�Ԫ;��ȡ��ˮ���� (14)��λ�������Զ���ϴ��(15)���Զ���ϴ��(15)����ˮ�˲�����ˮ ����(14)�ڣ��Զ���ϴ��(15)�ij�ˮ�����ϴ��λ��(12)�����ӣ��� λ����ϴˮ��(12)�ĵײ����ϴ����(11)�����ӣ���ϴ����(11)���� �ص�Ԫ(1)�ĵײ������ӣ���ϴ��λ��(12)�ڲ����ô�Զ��Һλָʾ��(13); �Զ���ϴ��(15)�Ŀ��ƿ��ؾ��Զ���ϴ������(16)�ʹ�Զ��Һλָʾ�� (13)�����˳ص�ԪԶ������Ʋ���̨(22)�����п�����(23)�ͼ���� ʾ��(24)�ڣ��ٽ�����վԶ�̿���վ(26);�Զ���ձ�(17)���ߵ�ѹ �������(18)�͵�ŷ���(9)���ӽ�ˮ������·(3)����ˮ������·(6); �ߵ�ѹ�������(18)���²�Ϊ��ѹ�����(28)����ѹ�����(28)��� ѹ��չ�(29)�����ӣ���ѹ��չ�(29)�����ϴ�˳���ˮ����(34)��; �缫ˮλָʾ��(30)�ĵײ���ߵ�ѹ�������(18)�²��ĸ�ѹ�����(28) �ĵײ������ӣ��缫ˮλָʾ��(30)���ϲ���ߵ�ѹ�������(18)���� ��������;�Զ���ѹ��(20)���ŷ���(9)����ͨ��ŷ�(31)�����ӣ� �Զ���ѹ��(20)���Զ���ѹ��������(21)�����ӣ��Զ���ѹ��������(21) ����վԶ�̿���վ(26)������;�˳ص�Ԫ(1)��һ���ϲ�����U�ν�ˮ�� ����·(3)����ˮ������·(3)һ�˲����˳���ˮ����(37)���˳ص�Ԫ (1)���˳���ˮ����(37)�����ӣ���ˮ������·(3)����һ�˲����ˮ ������·ˮ���(38)�ڣ���ˮ������·ˮ���(38)�ĵײ������˳ؽ�ˮ ��ˮ��(5)���˳ؽ�ˮ��ˮ��(5)��һ�˲����˳ص�Ԫ(1)�ڣ���ˮ���� ��·(3)���ϲ����ô���缫(4)����ˮ������·(3)���϶˲��������� �����������(35)���ƻ����������(36)�������������(35)��ߵ� ѹ�������(18)������;�˳ص�Ԫ(1)����һ���ϲ�����U����ˮ������ ·(6)����ˮ������·(6)��һ�˲����˳ص�Ԫ(1)����ˮ������ˮ��� (33)�ڣ���ˮ������·(6)����һ�˲����ϴ�˳���ˮ����(34)�ڣ��� ˮ������·(6)���ϲ����ô���缫(4)����ˮ������·(6)���϶˲��� �����ó����������(35)���ƻ����������(36)�������������(35) ���ƻ����������(36)��ߵ�ѹ�������(18)�����ӡ�
����2������Ȩ��Ҫ��1������˫���˳����ܻ�����ˮ����ϵͳ������������ ���˳ص�Ԫ(1)�²����ù���ˮ����(10)������ˮ����(10)����ˮ���� (14)�����ӣ�ʹ��ˮ����(14)���˳ص�Ԫ(1)����ͨ����ˮ����(14) ���IJ�λ�����Զ���ϴ��(15)���Զ���ϴ��(15)����ˮ�˲�����ˮ���� (14)�ڣ��Զ���ϴ��(15)�ij�ˮ�����ϴ��λ��(12)�����ӣ���λ�� ��ϴˮ��(12)�ĵײ����ϴ����(11)�����ӣ���ϴ����(11)���˳ص� Ԫ(1)�ĵײ������ӣ���ϴ��λ��(12)�����ô�Զ��Һλָʾ��(13); �����������(35)���ƻ����������(36)�Ŀ��ƿ������ŷ���(9)�� ���ӣ���ŷ���(9)���˳ص�ԪԶ������Ʋ���̨(22)������;����ˮ�� ��(10)�Ŀ��ƿ��غͳ�ϴ����(11)�Ŀ��ƿ������˳ص�ԪԶ������Ʋ� ��̨(22)������;�Զ���ϴ��(15)�Ŀ��ƿ������Զ���ϴ�ÿ�����(16) �����ӣ��Զ���ϴ�ÿ�����(16)�뷴��ϴ��Զ�̿���̨(23)������;�� ����ձ�(17)�Ŀ��ƿ��������ϵͳ������(19)����;�Զ���ѹ��(20) �Ŀ��ƿ������Զ���ѹ��������(21)������;��Զ��Һλָʾ��(13)�� ���ϵͳ������(19)���Զ���ѹ��������(21)���˳ص�ԪԶ������Ʋ� ��̨(22)��������ʩԶ�̼��ָʾ��(24)�ͼ���DZ�Զ��ָʾ��(25) ����վԶ�̿���վ(26)�����ӡ�
����3������Ȩ��Ҫ��1��2������˫���˳����ܻ�����ˮ����ϵͳ���������� �������г�����Ʋ����趨Ϊ�˳ص�Ԫ����ʱ��(T)��/���˳ص�Ԫ���е�ˮ ͷ��ʧ(H)ֵ��Ϊ���п���ָ������������վ����˳����Ƴ�ϴ����ģ ʽ���ö��ڳ�ϴ��/���г�ϴ��ʽ�������վ;�ߵ�ѹ�������(18)�ĸ� ѹ�����(28)�͵�ѹ�����(7)��Ϊ����ѹ״̬�������Զ���ձ�(17) ����գ��ߵ�ѹ�������(18)�ĸ�ѹ�����(28)����ն�����ѹ�� ����(7)����֮���ߵ�ѹ�������(18)���γ���ո�ѹ����ϴ�˳��� ˮ����(34)�ڵ�ˮλ�ڸ�ѹ��չ�·(29)�����ߣ���ѹ�����(7)�γ� ��նȿ���ֵ���Զ���ձ�(17)�ټ�������գ�ֻ�����ѹ�����(28) ����ն�ֵ��ˮ���ɸ�ѹ��չ�(29)���룬ֱ����ѹ�����(28)����� �ȿ���ֵ�ɵ缫ˮλָʾ��(30)�����ֹͣ�Զ���ձ�(17)�����У�ѭ ���������С�
����4������Ȩ��Ҫ��1��2������˫���˳����ܻ�����ˮ����ϵͳ���������� �����Զ���ձ�(17)��ת��ߵ�ѹ�������(18)�����ѹ�γɱջ��Զ� ���ƣ����ߵ�ѹ�������(18)�ڵ�ˮλ��ʹ�ߵ�ѹ�������(18)�ڵ� ���ѹ����һ�������ѹ��Χ���ߵ�ѹ�������(18)��װ�缫ˮλָʾ�� (30)���м��ˮλ;�缫ˮλָʾ��(30)�ġ���ˮ����ˮ���ź��Զ��� ʹ�Զ���ձ�(17)��������ת��ֹͣ�Լ��������������(27)�Ŀ����� �رգ���ʹ��ˮ������·(3)����ˮ������·(6)���˳ص�Ԫ(1)�Ľ�ˮ ����ˮ��
����5������Ȩ��Ҫ��1��2������˫���˳����ܻ�����ˮ����ϵͳ���������� �����涯���ƻ����������(36)(����ʱ����)�������������������(35) (����ʱ�ر�)������ŷ���(9)����ͨ��ŷ�(31)������ʱ��[1]-[2]· ��[1]-[3]·Ϊ�رգ�[2]-[3]·Ϊ����;���������������(35)���ƻ� ���������(36)����ʱ���ƻ����������(36)Ϊ�����������������(35) Ϊ�رգ���ˮ������·(3)��ߵ�ѹ�������(18)����ͨ����ˮ������· (3)�γɽ�ˮ����;�˳���ˮ����(37)��ˮ�ɽ�ˮ������·(3)����� ˮ������·ˮ���(38)���ھ��˳ؽ�ˮ��ˮ��(5)�����˳ص�Ԫ(1)��; ����ŷ���(9)����ͨ��ŷ�(31)������ʱ��[1]-[2]·Ϊ������[1]-[3] ·��[2]-[3]·Ϊ�رգ��������������(35)���ƻ����������(36)������ �ƻ����������(36)�����������������(35)�ر�;��ˮ������·(3) �������ͨ������ߵ�ѹ�������(18)�Ͽ�����ˮ�������ƻ�����ˮֹͣ�� �����������(35)�涯��������(����ʱ����)���ƻ����������(36)���� ��������(����ʱ�ر�)������ŷ���(9)����ͨ��ŷ�(31)������ʱ��[1]-[2] ��[1]-[3]·Ϊ�رգ�[2]-[3]·Ϊ����;�ų������������(35)���ƻ���� ������(36)�Ŀ������ƻ����������(36)Ϊ�����ͳ����������(35) Ϊ�ر�;��ˮ������·(6)�������ͨ������ߵ�ѹ�������(18)�Ͽ��� ��ˮ�������ƻ�;����ŷ���(9)����ͨ��ŷ�(31)������ʱ��[1]-[2] ·Ϊ������[1]-[3]��[2]-[3]·Ϊ�رգ���ߵ�ѹ�������(18)����ͨ;�� �ߵ��������(18)�ɵ�ŷ���(9)����ͨ��ŷ�(31)ʹ��ˮ������·(3) �ϵ��ƻ����������(36)�رգ����������������(35)��ʼ����գ��� ˮ������·(3)�γ����;��ˮ������·(3)�ϵĴ���缫(4)�����źţ� �˳���ˮ����(37)��ˮ����ˮ������·(3)�����˳ص�Ԫ(1)�ڣ��� ����ˮ����(10)�˳ص�Ԫ(1)��ʼ���С�
����6������Ȩ��Ҫ��1��2������˫���˳����ܻ�����ˮ����ϵͳ���������� �����˳ص�Ԫ(1)���е�״̬��Һλ��(2)���ָʾ�������е��ﵽ�趨 ʱ����/��ﵽ�˳ص�Ԫ(1)��ˮͷ��ʧ�趨ֵʱ���ֳ��˳ص�Ԫ����̨(22) ���ܺͷ��͵���վԶ�̿���վ(26)���г�ϴ�˳ص�Ԫ(1)�����ߵ�ѹ��� ����(18)�ɵ�ŷ���(9)����ͨ��ŷ�(31)�رճ����������(35)�� ���ƻ����������(36)����ˮ������·(3)����������ƻ���ˮ����ͣ ֹ��ˮ;�˳ص�Ԫ(1)��ˮλ�½��ﵽ�趨ֵ����Һλ��(2)�����źŵ� ͬʱ�жϸ�λ��ϴ��(12)��ˮλ������Զ��Һλָʾ��(13)ָʾ��ϴ�� �رչ���ˮ����(10)��������ˮ������·(6)�ij����������(35)���� �����������(36);���ߵ�ѹ�������(18)�ɵ�ŷ���(9)����ͨ��� ��(31)���ر��ƻ����������(36)�������������(35)ʱ��ˮ���� ��·(6)�γ���գ�����缫(4)�����ź�������ˮ������·(6)���� ��ϴˮ����(11)�����˳ص�Ԫ(1)���г�ϴ5��7���ӣ��رճ�ϴˮ����(11)�� �־��ߵ�ѹ�������(18)�ɵ�ŷ���(9)����ͨ��ŷ�(31)�رճ���� ������(35)�����ƻ����������(36)���������ͨ��ʹ��ˮ������·(6) ���������ֹͣ��ϴ���ֽ����˳ص�Ԫ(1)����������
����˵����
����˫���˳����ܻ�����ˮ����ϵͳ
�����������漰һ��ˮ�����Ĺ���ϵͳ���ر��漰һ��˫���˳����ܻ�����ˮ ����ϵͳ��
����Ŀǰ���˳��Ǿ�ˮ�����չ�������ؼ�����ʩ������֮Ϊˮ���������е� ���ࡣ�۹۵�����������ľ�ˮ���Բ������ձ����õ�����ʽ���˳� �͡�˫���˳ؼ���������ʽ���˳ص�һ����ʽ������˫���˳����ҹ��Ƽ��� Ա70�������ķ��˳غͺ����˳ص��ص㣬�ѽ�ˮ(Դˮ)����ˮ���ú��� �Ӷ�������˫����˫�����˳أ������˫���˳ء�����˫���˳ؾ��нṹ�� �������ƺ����ķ���С�ͻ����Ӷ���������ԼͶ�ʣ��ʴˣ�˫���˳ر� �㷺��Ӧ�á�
����˫���˳����ɵ綯��/���������źͺ���ϵͳ��ɿ���ϵͳ���ȣ������� �˹��ֶ������������Ͳ���ʹ˫���˳ذ��������״̬ʵ�����е���ѻ��� �����Ǵ���ˮ������ģΪ10��m3ˮ/�ջ�10��m3ˮ/�����ϣ��ֳɶ����Ԫ �˳صľ�ˮ����ͣ�����˹��ֶ�������״�����Ȳ��ܱ�֤ˮ�ʰ�ȫ����ķ� ������������������ʱ����Ҫ�����Խ��Խ�Ӷ����ƺ�Լ����˫���˳� ��ʹ�úͷ�չ��
������������Ŀ�ľ���Ϊ�������˫���˳������д��ڵ����⣬�ṩһ������ �˳ص�ˮͷ��ʧ������ʱ����������ؼ������в�����ʵ��˫���˳����ܻ� ����ˮ����ϵͳ��
������������˫���˳����ܻ�����ˮ����ϵͳ���ɵ綯��/���������źͺ��� ϵͳ��ɿ���ϵͳ���ȣ����������ɸ��˳ص�Ԫ����Ϊ�����ν��У� ��һ�����ֳ����ƣ����ֳ����Զ��˳صĵ綯���š�����������ź� ���豸(��ձá�����ϴ�á���ѹ��)ִ��Ԫ�����ֳ�ʵ�־͵ض���������
�����ڶ�����Զ������ƣ��ѵ����˳ص�Ԫ�������豸��ִ��Ԫ�������� ��Զ�����ֳ����˳ز���̨�Ͻ��е����˳ص�Ԫ��⼰������
�����������Ǽ������ܻ����ƣ����ѵ����˳ص�Ԫ���е�����վ��ʵ�ּ� �⡢��¼�����ܻ�������˳����ơ�
��������ģʽ���ϲ������������ˮ��ƹ淶��GBJ 13-86�и���涨ָ��� Ҫ����˹��ҵĿհף���ͼ1��ͼ4��ʾ��
�������г�����Ʋ����趨Ϊ�˳ص�Ԫ����ʱ��(T)���˳ص�Ԫ���е�ˮͷ ��ʧ(H)ֵ��Ϊ���п���ָ���������������ֵ��ѡ��һ�������վ����ʵ �����ܻ�˳����ơ�
������˳����Ƴ�ϴ����ģʽ���ö��ڳ�ϴ�ͼ��г�ϴ���֣���ѡ����һ�� �������վ����ʵ����˳����Ƶij�ϴ��
���������ɸ��˳�ѡ�ö��ڳ�ϴʱ����ϴ����ʱ���趨Ϊn(n=24Сʱ)Сʱ �������£���ӵ�һ���˳ص�Ԫ�ij�ϴ��ʼ����һ���˳ص�Ԫ��ϴ��ʼ˳�� ����ʱ��ļ�����㹫ʽΪ��
����T=24��N(N=�˳ص�Ԫ��������=6��)
����=24��6=4Сʱ
�������ڳ�ϴ˳�����ʱ�估����ϵ��ͼ2��ʾ��
���������ɸ��˳�ѡ�ü��г�ϴʱ����ϴʱ���趨Ϊ5��7���ӣ���ʱ��ļ� ��ʱ��X=5��15���ӣ��ӵ�һ���˳ص�Ԫ��N(N=6)���˳ص�Ԫ�ļ��г�ϴ ʱ����㹫ʽΪ��
����T=(5��7)��6+(5��15)��(6-1)
����=5��6+5��5=55���� (1)
����=7��6+15��5=117���� (2)
��������55��117����ʱ�������ȫ����ϴ�����г�ϴ˳�����ʱ�估���� ϵ��ͼ3��ʾ��
������ϴϵͳ���ɳ�ϴ��15����λ����ϴ��12��ɣ���ȡ��ˮ����14��λ�� �����Զ���ϴ��15���Զ���ϴ��15����ˮ�˲�����ˮ����14�ڣ��Զ���ϴ ��15�ij�ˮ�����ϴ��λ��12�����ӣ���λ����ϴˮ��12�ĵײ����ϴ�� ��11�����ӣ���ϴ����11���˳ص�Ԫ1�ĵײ������ӣ���ϴ��λ��12�ڲ� ���ó�ϴ��λ��Զ��Һλָʾ13����������ƿ��ؾ��Զ���ϴ������16�� ���Һλ��13�����˳ص�ԪԶ������Ʋ���̨22�����п�����23�ͼ���� ʾ��24�ڣ��ٽ�����վԶ�̿���վ26�������Զ���ѹ��20���Զ���ѹ���� ����21���в������㶨���趨����ѹֵ���ӵ�ŷ���9��������ʾ��24�� ��վԶ�̿���վ26�ڽ��п��ƽ�ˮ������·3����ˮ������·6�ϵij���� ������35���ƻ����������36�����ϵͳ�����Զ���ձ�17���ߵ�ѹ��� ����18�͵�ŷ���9���ӽ�ˮ������·3����ˮ������·6�����װ�õ��� ���γ����˳�ʵ���Զ����ƵĹؼ���
��������γɿɰ����½ν��У�
������һ�Σ��ߵ�ѹ�������18�ĸ�ѹ�����28�͵�ѹ�����7��Ϊ���� ѹ״̬;
�����ڶ��Σ��Զ���ձ�17��������գ������Ÿߵ�ѹ�������18�ĸ�ѹ �����28����ն�����ѹ�����7����֮�������ڸߵ�ѹ�������18 ���γ���ո�ѹ����ϴ�˳���ˮ����34�ڵ�ˮλ�ڸ�ѹ��չ�·29�����ߣ� ��ˮλ�ﵽH1mʱ����ѹ�����7����նȿ���ֵ���γɣ��Զ���ձ�17�� ��������գ�ֻ�����ѹ�����28����ն�ֵ��ˮ���ɸ�ѹ��չ�29���룬 ֱ����ѹ�����28����նȿ���ֵ�ɵ缫ˮλָʾ��30�����ֹͣ�Զ� ��ձ�17�����У�ѭ������������ʵ�����ϵͳ�ջ�����;
���������Σ���ѹ�����7�ĵ�ѹ��չ�8��ˮ��ס���γɵ�ѹ�����7�� ���ѹΪVp=-H1mAq;
�������ĽΣ���ѹ�����28��������������ѹΪVp=-H2mAq��
��������Σ���ѹ�����28�ﵽ���ˮλ�����ѹΪVp=-H3mAq;��� �γɣ��Զ���ձ�17ֹͣ���С�
������������������ڵ����ѹת�����˸ߵ�ѹ�������18�ڻ����չ�· 29�ڵ�ˮλ���ϴ��ˮ����34ˮλ��ˮλ����ԣ���ѹ�����28�ڵ��� ��ѹԽ�ͣ�ˮλԽ���¡��෴�����ѹԽ�ߣ�ˮλԽ���ϡ���ʱ����ˮ���� ��·3������գ���ˮ������·3�ڵ�ˮλ������������ˮλH1mʱ������ ֹͣ��������ˮ������·3�γ���ա�
�������ڽ�ˮ�����Ķ�����ʹ�ø�ѹ�����28�ڵ����ѹ�½�����ʱ�ߵ�ѹ �������18�ڵ�ˮλ���ﵽһ��ˮλ����ʱ���Զ���ձ�17��ʼ�������� ��ˮλ���ⲿˮλ֮������½������ߵ�ѹ�������18�ڵ�ˮλ���������� ���趨��ˮλʱ���Զ���ձ�17ֹͣ����ˮ������·6�γ���ˮ��������ʱ ˮλΪH4m���Զ���ձ�17��ת��ߵ�ѹ�������18�����ѹ�γɱջ��� �����ơ����ߵ�ѹ�������18�ڵ�ˮλ��ʹ�ߵ�ѹ�������18�ڵ���� ѹ����һ�������ѹ��Χ���ߵ�ѹ�������18��װ�缫Һλ��30���м�� ˮλ�����ݵ缫ˮλָʾ��30�ġ���ˮ����ˮ���ź��Զ���ʹ�Զ���ձ�17 ��������ת��ֹͣ�Լ��������������27�Ŀ����رա��ߵ�ѹ�������18 ����ղ����������γɺ���ʹ��ˮ������·3����ˮ������·6ʵ���� �ص�Ԫ1�Ľ�ˮ����ˮ���Զ����ơ���ͼ1��ͼ4��ͼ5��ͼ8��ʾ��
�����ߵ�ѹ�������18���²�Ϊ��ѹ�����28����ѹ�����28���ѹ��չ� 29�����ӣ���ѹ��չ�29�����ϴ�˳���ˮ����34�ڡ��缫ˮλָʾ��30 �ĵײ���ߵ�ѹ�������18�²��ĸ�ѹ�����28�ĵײ������ӣ��缫ˮλ ָʾ��30���ϲ���ߵ�ѹ�������18���в������ӡ��Զ���ѹ��20���� ����9����ͨ��ŷ�31�����ӣ��Զ���ѹ��20���Զ���ѹ��������21���� �ӣ��Զ���ѹ��������21����վԶ�̿���վ26�����ӡ���ͼ1��ͼ4��ͼ5�� ͼ8��ʾ��
�����ߵ�ѹ�������18�γ���պ�ʹ��ˮ������·3����ˮ������·6 ʵ���˳ص�Ԫ1��ˮ��������ˮ���������ܻ��Զ����ơ�
�����˳ص�Ԫ1��һ���ϲ�����U�ν�ˮ������·3����ˮ������·3һ�˲� ���˳���ˮ����37���˳ص�Ԫ1���˳���ˮ����37�����ӣ���ˮ������·3 ����һ�˲����ˮ������·ˮ���38�ڣ���ˮ������·ˮ���38�ĵײ��� ���˳ؽ�ˮ��ˮ��5���˳ؽ�ˮ��ˮ��5��һ�˲����˳ص�Ԫ1�ڣ���ˮ���� ��·3���ϲ����ô���缫4����ˮ������·3���϶˲��������ó�������� ��35���ƻ����������36�������������35��ߵ�ѹ�������18�����ӣ� ��ͼ1��ͼ4��ͼ6��ͼ8��ʾ��
�����涯���ƻ����������36(����ʱ����)�������������������35(�� ��ʱ�ر�)������ŷ���9����ͨ��ŷ�31������ʱ��[1]-[2]·��[1]-[3] ·Ϊ�رգ�[2]-[3]·Ϊ���������������������35���ƻ���������� 36����ʱ���ƻ����������36Ϊ�رգ������������35Ϊ��������ˮ���� ��·3��ߵ�ѹ�������18����ͨ����ˮ������·3�γɽ�ˮ��������ʱˮ λ�ԴﵽH1m���˳���ˮ����37��ˮ�ɽ�ˮ������·3�����ˮ������·ˮ ���38���ھ��˳ؽ�ˮ��ˮ��5�����˳ص�Ԫ1�ڡ�����ŷ���9����ͨ�� �ŷ�31������ʱ��[1]-[2]·Ϊ������[1]-[3]·��[2]-[3]·Ϊ�رգ������� ��������35���ƻ����������36���������ƻ����������36����������� ������35�رա�





