申请日2019.12.09
公开(公告)日2020.03.27
IPC分类号C02F11/00; C02F11/14
摘要
本发明公开了一种暂存库区污泥药剂真空预压智能集成原位处理方法及装置,解决了装配式施工垫层技术、三重管喷药远程智能控制技术、臭气无缝收集技术和地基土调理‑脱水‑资源化一体技术的实际问题,本发明基于药剂真空预压法和溶解气‑药剂真空预压法,提出了现场实施的成套技术方法和装置,实现各种暂存库区中污泥药剂真空预压原位处理智能集成,不仅能保证两个污泥原位处理方法的顺利实施,而且在环境工程的其他方面也有着极其广阔的应用前景及良好的社会效益,智能化程度高,易于实现和控制,对环境保护具有重要意义。
权利要求书
1.一种暂存库区污泥药剂真空预压智能集成原位处理方法,其特征在于,包括如下步骤:
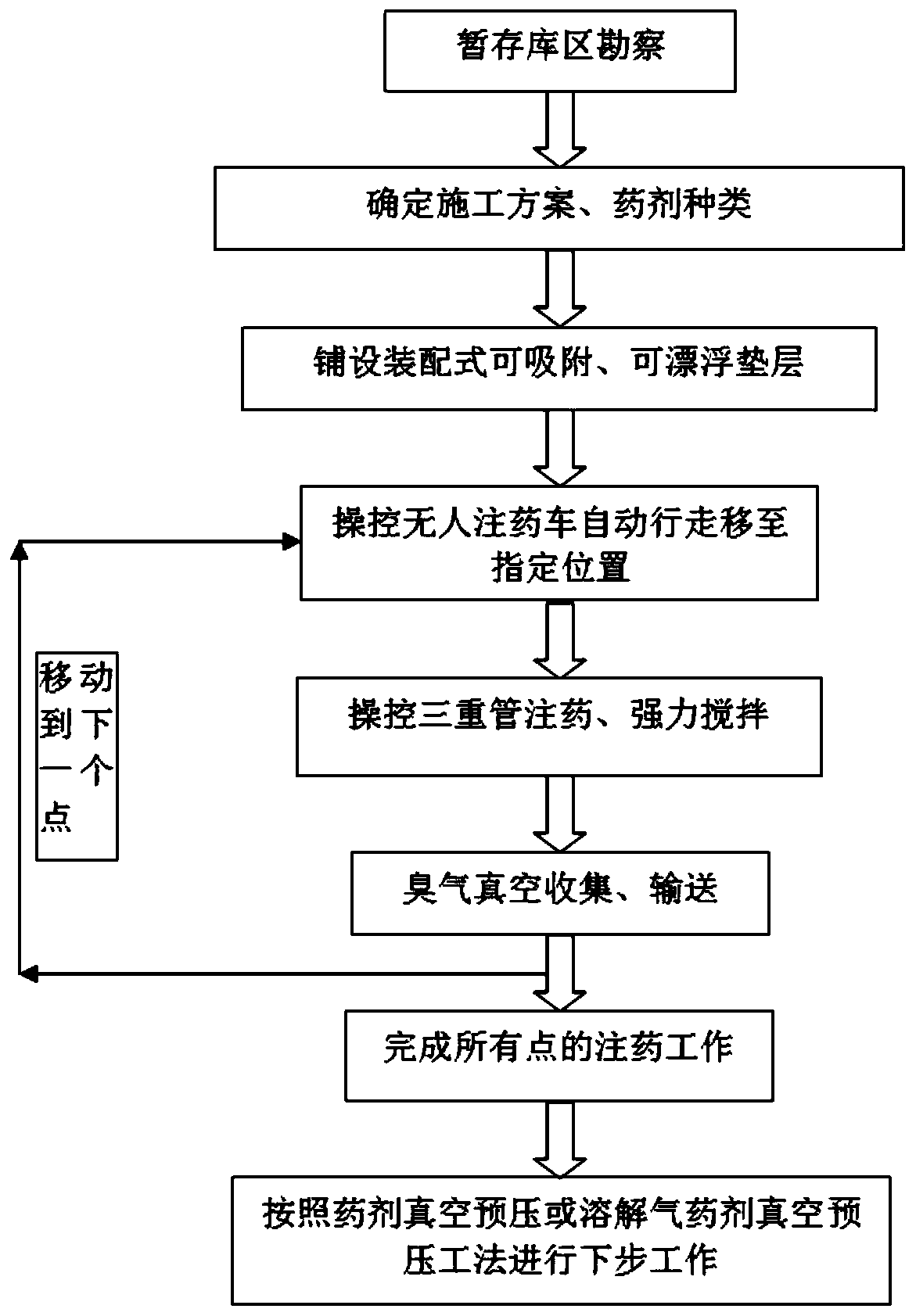
a.装配式可吸附、可漂浮垫层施工过程:
将轻型聚合材料制成的装配式垫层,铺设在HDPE覆盖膜的表面,一系列装配式垫层连接成连片的装配式垫层;装配式垫层的底部的真空吸盘与HDPE覆盖膜紧密吸附,起到固定装配式垫层与HDPE覆盖膜相对位移的作用,连片的装配式垫层的外围周边与暂存库区边缘混凝土围墙固定联接,在HDPE覆盖膜的表面形成整体性的装配式可吸附、可漂浮垫层;即使发生HDPE覆盖膜局部破损,或者HDPE覆盖膜完全破损,或者没有HDPE覆盖膜,由于装配式垫层采用轻型高分子聚合材料制成,使装配式可吸附、可漂浮垫层也漂浮在污泥表面上或者叠放在HDPE覆盖膜表面上,从而在污泥上方形成支撑表面;
b.原位注药调理污泥过程:
通过远程智能方法,控制驱动三重管无人注药车在所述装配式可吸附、可漂浮垫层上行走,在卫星系统的引导下,定位到在事先设计好的注药点位处,进行钻进、提升、注药、搅拌操作,当一个点位施工结束后,使三重管无人注药车移至下一点位,依次完成所有规划点位的注药工作,完成原位注药调理污泥过程;
所述三重管无人注药车能够将三种不同药剂同步或异步注入污泥中;
原位注药调理污泥过程中,在三重管无人注药车的主机架下方设置臭气防喷护罩,将在钻进、注药、搅拌作业过程中产生的污染气体进行收集,并采用真空泵抽吸管道输送到臭气处理车间进行集中处理;
在原位注药调理污泥过程中,还进行污泥调理-脱水-固化处理过程,在所注入的药剂中,除了包含调理作用的成分之外,还包括固化成分,并且固化成分起作用具有设定的滞后时间,在调理药剂作用释放出污泥中的水分之后,固化剂再起作用,这样来调控污泥调理作业与污泥固化作业不发生相互影响,从而使脱水后污泥的强度得到提升,并使处理后的污泥最终固化成地基土。
2.根据权利要求1所述暂存库区污泥药剂真空预压智能集成原位处理方法,其特征在于:在所述步骤b中,调理剂与固化剂分别由三重管无人注药车的不同的注药管注入污泥中,使调理剂与固化剂发挥作用存在时间差。
3.根据权利要求1所述暂存库区污泥药剂真空预压智能集成原位处理方法,其特征在于:在所述步骤b中,三重管无人注药车向污泥中注入的药剂除了液体之外,还能向污泥中注入气体。
4.一种装配式可吸附、可漂浮垫层,其特征在于:在实施权利要求1所述暂存库区污泥药剂真空预压智能集成原位处理方法时,进行装配式可吸附、可漂浮垫层施工过程,所述装配式可吸附、可漂浮垫层采用有机高分子聚合材料制成垫层块(1);每个垫层块(1)为中空的且密闭的,在垫层块(1)与HDPE覆盖膜(16)或者污泥接触的一侧设有真空吸盘(2),真空吸盘(2)采用聚氨酯材料制成;在垫层块(1)上还设有钻进注药孔(3),相邻的垫层块(1)通过螺栓连接件(4)进行连接,组成整体性的连片的装配式可吸附、可漂浮垫层,使装配式可吸附、可漂浮垫层也漂浮在污泥表面上或者叠放在HDPE覆盖膜表面上,从而在污泥上方形成支撑表面。
5.一种远程智能控制驱动三重管无人注药车,其特征在于:在实施权利要求1所述暂存库区污泥药剂真空预压智能集成原位处理方法时,利用远程智能控制驱动三重管无人注药车进行原位注药调理污泥过程,所述远程智能控制驱动三重管无人注药车包括行走子系统、定位子系统、搅拌子系统与加药子系统;
所述行走子系统包括无人注药车主机架(6)、无人注药车履带(5)和行走控制系统,在无人注药车主机架(6)上安装行走控制系统,行走控制系统控制行走子系统提供行走动力;所述定位子系统与远程控制装置进行信号传输;
搅拌子系统包括塔架、无人注药车固定桁架(20)、传动链条(14)、三重钻杆(10)、钻进控制系统;钻进控制系统设置于在无人注药车主机架(6)上;所述塔架通过无人注药车固定桁架(20)固定安装在无人注药车主机架(6)上;塔架上安装有传动链条(14),由动力传输系统驱动三重钻杆(10)进行转动,由钻进控制系统驱动传动链条(14),牵引三重钻杆(10)进行升降运动,使三重钻杆(10)向下钻进或向上升起,三重钻杆(10)组成搅拌系统和钻进系统联用的复合搅拌桩机装置,使三重钻杆(10)的底端钻进污泥中进行转子搅拌作业;
所述加药子系统包括无人注药车的倒置槽形防喷护罩(7)、三重管喷头(11)、三重管输药管(13)、组合注药泵(15),三重管喷头(11)设置于三重钻杆(10)底端,三重钻杆(10)具有内、中、外三层管组成三重管空心夹层结构,分别由三重管内管(17)、三重管中管(18)和三重管外管(19)形成套装的三层组合管,从而在三重钻杆(10)内部形成独立的三条管道,各管道分别与连接不同的组合注药泵(15)的不同药剂注浆泵,为加药提供泵送动力,三重管喷头(11)与三重钻杆(10)内的管道底端连通,三重管喷头(11)的不同喷嘴分别与三重钻杆(10)内的不同输送药剂的管路对应连通,三重管喷头(11)的各喷嘴分别进行药剂喷射;无人注药车的倒置槽形防喷护罩(7)固定安装于无人注药车主机架(6)的下方;当三重管喷头(11)进行药剂喷射和三重钻杆(10)的底端对污泥进行搅拌时,无人注药车的倒置槽形防喷护罩(7)能罩在被处理的污泥区域,将处理区域上表面与外界隔离,利用无人注药车的倒置槽形防喷护罩(7)回收臭气及其他污染气体,利用真空抽吸泵(8)通过臭气输送管(9)将污染气体输送到臭气处理车间进行集中处理;
所述搅拌子系统还包括智能触底传感器(12),智能触底传感器(12)设置于三重钻杆(10)底部,实时检测三重钻杆(10)底端与污泥底部的施工垫层的距离,当三重钻杆(10)底端与污泥底部的密封膜接近,并且当三重钻杆(10)底端与污泥底部的施工垫层距离缩小到设定距离时,智能控制系统通过控制钻杆三重钻杆(10)自动停止钻进,并开始向上提升、回转、注药。
6.根据权利要求5所述远程智能控制驱动三重管无人注药车,其特征在于:通过GPS或北斗卫星定位系统,使所述行走系统接收远程控制信号,将取样点坐标输入到远程控制系统数据库中,形成取样地图,并规划取样路线,完成前进、后退、转弯、避障动作,并进行位置进行无人驾驶定点作业。
7.根据权利要求5所述远程智能控制驱动三重管无人注药车,其特征在于:所述智能触底传感器(12)实时检测三重钻杆(10)底端与污泥底部的施工垫层的防渗膜距离,当检测到三重钻杆(10)底端与污泥底部的施工垫层的防渗膜距离缩小到20cm时,三重钻杆(10)自动停止钻进,并开始向上提升、回转、注药。
8.根据权利要求5所述远程智能控制驱动三重管无人注药车,其特征在于:无人注药车的倒置槽形防喷护罩(7)的顶端与无人注药车主机架(6)固定连接,无人注药车的倒置槽形防喷护罩(7)覆盖整个注药搅拌出口;无人注药车的倒置槽形防喷护罩(7)侧面开孔与柔性真空管相连,柔性真空管与真空抽吸泵(8)相连,将臭气与化学反应生成的污染气体一同抽走收集处理。
说明书
暂存库区污泥药剂真空预压智能集成原位处理方法及装置
技术领域
本发明涉及一种泥浆处理方法及装置,特别是涉及一种对污泥坑中污泥进行处理的方法及装置,应用于岩土工程及资源环境保护技术领域。
背景技术
工程废弃泥浆,简称“废浆”。随着工程施工过程中所产生工程废弃泥浆也越来越多,废弃泥浆会对放置场所造成严重污染。随着人们环保意识逐渐增强,这种粗放的泥浆处置方式不断受到质疑和反对,迫切要求业内技术人员开发高效、环保的泥浆处置技术。
专利号为ZL201510322445.6的专利文献公开了一种处理工程废弃泥浆的药剂真空预压法,专利号为ZL201610138789.6的专利文献公开了一种溶解气-药剂真空预压法,其中药剂真空预压法主要针对一般的工程废弃泥浆。而溶解气-药剂真空预压法主要针对有机质含量高、含盐量高的工程废弃浆,粘粒含量高的吹填淤泥,以及含有大量厌氧细菌、蛋白、多糖的超高含水量污泥。但随着技术在工程实践中的不断推进,一些问题逐渐突显出来:
1.污泥暂存库区中的污泥强度极低,施工设备容易沉陷,无法直接进场施工;2.污泥暂存库区原来是采用高强度的HDPE膜覆盖,在施工过程中注药、搅拌、插板等装置会破坏这层覆盖膜,安全受到威胁;3.几种药剂之间、药剂与污泥之间的反应要求有先后顺序与时间差,否则达不到处理效果;4.在施工过程中覆盖膜破坏后臭气会外溢,对周边环境造成污染甚至超标,这在环保上所不允许的;5.待处理的污泥不仅面临体积减量问题,而且还面临最终去向的问题。这是目前药剂真空预压法、溶解气药剂真空预压法在具体实践过程中所面临的几个现实问题,这些问题实际上是一个系统工程,需要相应的综合集成技术来解决。
为了解决问题1,一般在泥面设备临时施工垫层,但是对于污泥暂存库区来说,表面已经有一层HDPE膜,不过由于时间过久,很难保证施工过程中不出事故,因此,这层HDPE膜是不能作为施工垫层的,这也是与普通淤泥处理不同的地方,只有在暂存库区才会遇到的问题,必须针对这一特殊情况考虑设置新的垫层。如果问题1解决了的话,问题2也就迎刃而解,二者实质上是一个问题。
对于问题1,由于调理药剂之间是相互影响的,比如过氧化氢与Fe2+发生化学反应可以生成具有强氧化性的羟基自由基(OH・),同时释放出大量热量,促使污泥快速升温,对污泥中的胶状结构进行解聚,但由于二者反应时间极短,反应结束并经过一段时间后解聚作用就会大大减弱,这就需要药剂直接在污泥中发生反应,以便马上与污泥接触并充分混合,这就对加药系统与搅拌系统提出了更高要求,因而,必须研发适用于这种新情况的工艺与设备。
对于问题4中的臭气外溢,由于处理过程中HDPE膜必然会遭到破坏,因此,臭气外溢也是必然的,为了不污染环境需要收集臭气并进行处理,之前的臭气收集系统是布置在暂存库区内的,是静止的,而现在是需要在施工过程中收集处理,即移动式收集处理工艺。另外,由于化学反应过程非常剧烈,还可能产生有毒有害气体,需要考虑对人体产生危害,并将这些气体与臭气一并进行收集处理,因此,整个臭气收集处理过程非常重要,难度更大。
问题5是处理后污泥的去向,即用途问题,目前暂存库区的污泥减量后仍然是填埋,由于绿色环保和循环经济理念的不断加深,填埋并非最好的处置方式,在减量后将暂存库区污泥资源化是唯一出路,这就对调理药剂和脱水技术提出了更高要求。
发明内容
为了解决现有技术问题,本发明的目的在于克服已有技术存在的不足,提供一种暂存库区污泥药剂真空预压智能集成原位处理方法及装置,解决了装配式施工垫层技术、三重管喷药远程智能控制技术、臭气无缝收集技术和地基土调理-脱水-资源化一体技术的实际问题,本发明基于药剂真空预压法和溶解气-药剂真空预压法,提出了现场实施的成套技术方法和装置,实现各种暂存库区中污泥药剂真空预压原位处理智能集成,不仅能保证两个污泥原位处理方法的顺利实施,而且在环境工程的其他方面也有着极其广阔的应用前景及良好的社会效益,智能化程度高,易于实现和控制。
为达到上述目的,本发明采用如下技术方案:
一种暂存库区污泥药剂真空预压智能集成原位处理方法,包括如下步骤:
a.装配式可吸附、可漂浮垫层施工过程:
将轻型聚合材料制成的装配式垫层,铺设在HDPE覆盖膜的表面,一系列装配式垫层连接成连片的装配式垫层;装配式垫层的底部的真空吸盘与HDPE覆盖膜紧密吸附,起到固定装配式垫层与HDPE覆盖膜相对位移的作用,连片的装配式垫层的外围周边与暂存库区边缘混凝土围墙固定联接,在HDPE覆盖膜的表面形成整体性的装配式可吸附、可漂浮垫层;即使发生HDPE覆盖膜局部破损,或者HDPE覆盖膜完全破损,或者没有HDPE覆盖膜,由于装配式垫层采用轻型高分子聚合材料制成,使装配式可吸附、可漂浮垫层也漂浮在污泥表面上或者叠放在HDPE覆盖膜表面上,从而在污泥上方形成支撑表面;
b.原位注药调理污泥过程:
通过远程智能方法,控制驱动三重管无人注药车在装配式可吸附、可漂浮垫层上行走,在卫星系统的引导下,定位到在事先设计好的注药点位处,进行钻进、提升、注药、搅拌操作,当一个点位施工结束后,使三重管无人注药车移至下一点位,依次完成所有规划点位的注药工作,完成原位注药调理污泥过程;
三重管无人注药车能够将三种不同药剂同步或异步注入污泥中;
原位注药调理污泥过程中,在三重管无人注药车的主机架下方设置臭气防喷护罩,将在钻进、注药、搅拌作业过程中产生的污染气体进行收集,并采用真空泵抽吸管道输送到臭气处理车间进行集中处理;
在原位注药调理污泥过程中,还进行污泥调理-脱水-固化处理过程,在所注入的药剂中,除了包含调理作用的成分之外,还包括固化成分,并且固化成分起作用具有设定的滞后时间,在调理药剂作用释放出污泥中的水分之后,固化剂再起作用,这样来调控污泥调理作业与污泥固化作业不发生相互影响,从而使脱水后污泥的强度得到提升,并使处理后的污泥最终固化成地基土。
作为本发明优选的技术方案,在步骤b中,调理剂与固化剂分别由三重管无人注药车的不同的注药管注入污泥中,使调理剂与固化剂发挥作用存在时间差。
作为本发明优选的技术方案,在步骤b中,三重管无人注药车向污泥中注入的药剂除了液体之外,还能向污泥中注入气体。
一种装配式可吸附、可漂浮垫层,在实施本发明暂存库区污泥药剂真空预压智能集成原位处理方法时,进行装配式可吸附、可漂浮垫层施工过程,装配式可吸附、可漂浮垫层采用有机高分子聚合材料制成垫层块1;每个垫层块1为中空的且密闭的,在垫层块1与HDPE覆盖膜16或者污泥接触的一侧设有真空吸盘2,真空吸盘2采用聚氨酯材料制成;在垫层块1上还设有钻进注药孔3,相邻的垫层块1通过螺栓连接件4进行连接,组成整体性的连片的装配式可吸附、可漂浮垫层,使装配式可吸附、可漂浮垫层也漂浮在污泥表面上或者叠放在HDPE覆盖膜表面上,从而在污泥上方形成支撑表面。
一种远程智能控制驱动三重管无人注药车,在实施本发明暂存库区污泥药剂真空预压智能集成原位处理方法时,利用远程智能控制驱动三重管无人注药车进行原位注药调理污泥过程,远程智能控制驱动三重管无人注药车包括行走子系统、定位子系统、搅拌子系统与加药子系统;
行走子系统包括无人注药车主机架、无人注药车履带和行走控制系统,在无人注药车主机架上安装行走控制系统,行走控制系统控制行走子系统提供行走动力;定位子系统与远程控制装置进行信号传输;
搅拌子系统包括塔架、无人注药车固定桁架、传动链条、三重钻杆、钻进控制系统;钻进控制系统设置于在无人注药车主机架上;塔架通过无人注药车固定桁架固定安装在无人注药车主机架上;塔架上安装有传动链条,由动力传输系统驱动三重钻杆进行转动,由钻进控制系统驱动传动链条,牵引三重钻杆进行升降运动,使三重钻杆向下钻进或向上升起,三重钻杆组成搅拌系统和钻进系统联用的复合搅拌桩机装置,使三重钻杆的底端钻进污泥中进行转子搅拌作业;
加药子系统包括无人注药车的倒置槽形防喷护罩、三重管喷头、三重管输药管、组合注药泵,三重管喷头设置于三重钻杆底端,三重钻杆具有内、中、外三层管组成三重管空心夹层结构,分别由三重管内管、三重管中管和三重管外管形成套装的三层组合管,从而在三重钻杆内部形成独立的三条管道,各管道分别与连接不同的组合注药泵的不同药剂注浆泵,为加药提供泵送动力,三重管喷头与三重钻杆内的管道底端连通,三重管喷头的不同喷嘴分别与三重钻杆内的不同输送药剂的管路对应连通,三重管喷头的各喷嘴分别进行药剂喷射;无人注药车的倒置槽形防喷护罩固定安装于无人注药车主机架的下方;当三重管喷头进行药剂喷射和三重钻杆的底端对污泥进行搅拌时,无人注药车的倒置槽形防喷护罩能罩在被处理的污泥区域,将处理区域上表面与外界隔离,利用无人注药车的倒置槽形防喷护罩回收臭气及其他污染气体,利用真空抽吸泵通过臭气输送管将污染气体输送到臭气处理车间进行集中处理;
搅拌子系统还包括智能触底传感器,智能触底传感器设置于三重钻杆底部,实时检测三重钻杆底端与污泥底部的施工垫层的距离,当三重钻杆底端与污泥底部的密封膜接近,并且当三重钻杆底端与污泥底部的施工垫层距离缩小到设定距离时,智能控制系统通过控制钻杆三重钻杆自动停止钻进,并开始向上提升、回转、注药。
作为本发明优选的技术方案,通过GPS或北斗卫星定位系统,使行走系统接收远程控制信号,将取样点坐标输入到远程控制系统数据库中,形成取样地图,并规划取样路线,完成前进、后退、转弯、避障动作,并进行位置进行无人驾驶定点作业。
作为本发明优选的技术方案,智能触底传感器实时检测三重钻杆底端与污泥底部的施工垫层的防渗膜距离,当检测到三重钻杆底端与污泥底部的施工垫层的防渗膜距离缩小到20cm时,三重钻杆自动停止钻进,并开始向上提升、回转、注药。
作为本发明优选的技术方案,无人注药车的倒置槽形防喷护罩的顶端与无人注药车主机架固定连接,无人注药车的倒置槽形防喷护罩覆盖整个注药搅拌出口;无人注药车的倒置槽形防喷护罩侧面开孔与柔性真空管相连,柔性真空管与真空抽吸泵相连,将臭气与化学反应生成的污染气体一同抽走收集处理。
本发明中的装配式可吸附、可漂浮施工垫层技术,由于填埋暂存库区表层一般已经铺设了一层HDPE膜,由于铺设时间比较长,已经有一定的老化,采用常规施工垫层风险比较大,本发明对常规垫层进行了改进,采用装配式土工材料垫层,该垫层具有如下技术特点:1)材质为高分子聚合土工材料,不仅质量轻,可以漂浮在污泥表面上;2)相邻各垫层块之间采用万向节联接件连接,抗拉/抗剪强度高,整体性好,即使HDPE膜断开也不会掉入下面的污泥池内;3)为防止施工垫层与HDPE膜之间发生滑动,在施工垫层底部设置有真空吸盘,进一步提高了膜破坏之后的安全性能。
本发明中采用三重管喷药远程智能控制方法,具有智能远程控制定位、行走、加药、搅拌等四个功能,分别由定位系统、行走系统、加药系统与搅拌系统来完成,具有如下几个技术特点:
1.采用GPS、北斗定位系统实现移动式定位,钻孔定位精度小于1cm;2.实现无人驾驶,能够通过程序远程控制完成前进、后退、转弯、避障等动作;3.搅拌钻杆与注药管两者二合一,称为搅拌注药机,采用橡胶材料制成的履带行进,所有的操作都是远程控制进行;4.搅拌装置采用三轴搅拌,兼有钻进和搅拌功能,每个轴设置三根注药管,每根注药管连接不同的药剂注浆泵,一方面保证药剂直接在污泥中发生化学反应,另一方面可以根据需要设定各种药剂注入的先后顺序与间隔时间,以使各种药剂反应相互配合,将药剂效果发挥到最大;5.通过远程控制注药泵在污泥中加入调理药剂,并在喷头处设置智能压力传感器,根据污泥的压力大小调整药剂出流量和注药压力,确保药剂在污泥中的均匀分布;6.与普通搅拌钻头不同之处,还有在钻头头部设置有智能触底传感器,一旦钻头头部碰到污泥底下的密封膜,搅拌机马上停止钻进,并返回向上提升与搅拌。
本发明采用臭气收集方法为了防止在进行垫层施工、药剂注入与搅拌、塑料排水板插打,以及其他可能造成HDPE膜破损的工作时,发生臭气外泄所采用的收集措施,由于臭气外泄主要发生在药剂真空预压施工前期阶段,因此,本发明的臭气收集装置和方法是在主机架下方设置防喷护罩,顶端小口与主机架连接,下端大口与地面施工垫层自然接触,在中间腰部有一个开口,与真空管相连,喷药过程中可以将臭气与化学反应生成的污染气体一同抽走收集,起到防止污染的作用。
本发明方法采用地基土调理-脱水-固化三合一技术方法,是跳出目前原位减量处理的思路,在药剂性能方面,不再单单考虑最大限度释放胞内结合水,同时还考虑减量后污泥的资源化。采用药剂真空预压法处理之后,将其作为地基土使用是最直接、最方便的一种处置途径,而为了实现这种处置方式,固化剂和处理后的污泥应满足如下要求:1.药剂中加入固化剂成分,使污泥的强度进一步提高,无侧限抗压强度达到80kPa以上,压缩性降低,压缩系数小于0.2;2.为了避免与调理脱水药剂的冲突,固化剂的固化作用应具有延时性,延长时间约1个小时左右,即在调理过程中不发挥作用,只在脱水后期发挥作用。
本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:
1.本发明装置对常规垫层进行了改进,采用装配式土工材料垫层,可以漂浮在污泥表面上,连片垫层整体性好,提高了HDPE膜破坏之后的安全性能;
2.本发明装置三重管喷药远程智能控制技术,该技术具有智能远程控制定位、行走、加药、搅拌等四个功能,分别由定位系统、行走系统、加药系统与搅拌系统来完成;本发明臭气收集技术指的是为了防止在进行垫层施工、药剂注入与搅拌、塑料排水板插打,以及其他可能造成HDPE膜破损的工作时,发生臭气外泄所采用的收集措施;
3.本发明装置通过远程控制注药泵在污泥中加入调质药剂,并在喷头处设置智能压力传感器,根据污泥的压力大小调质药剂出流量和注药压力,确保药剂在污泥中的均匀分布;与普通搅拌钻头不同之处,本发明还有在钻头头部设置有智能触底识别传感器,一旦钻头头部碰到密封膜底下的密封膜,搅拌机马上停止钻进,并返回向上提升与搅拌;
4.本发明方法采用地基土调理-脱水-固化三合一技术方法,使污泥最终资源化,解决了最终处理的难题。(发明人陈广;姚杰;武亚军;张旭东)

