
申请日2018.08.20
公开(公告)日2018.12.18
IPC分类号C02F1/66; C02F1/52; C02F101/20
摘要
本发明涉及一种废水排放流向检测与治理方法及装置。将流向检测装置安装在排污管最前端或污水池上,对其进行远程控制释放检测球,流向检测装置中的抓取装置可将转轮上放置有检测球的检测球投放器取下,并用启动器将其激活;检测球进入污水中后随污水排放,若排放至河流或污水坑等露天处,则可通过检测球中的定位系统得到排放位置,若长时间未收到定位信号,可判断为排放至地下致信号传输受阻,获得排放位置后将无人废水治理船运至河流或污水坑中,检测污水源头的重金属含量,释放不同的中和剂或沉淀剂,消除重金属离子,当药剂使用殆尽时可驶回岸边手动补充,避免污染范围的扩大,并可利用船体自带的风力和太阳能补充电能,提高续航力。
权利要求书
1.一种废水排放流向检测与废水治理方法,由以下步骤组成:
Step1.将流向检测装置安装在排污管起始端或污水池上部,利用远程控制向排污管或污水池中释放检测球;
Step2.检测球随污水共同排放,若污水排入河流中,利用检测球中的定位装置可准确得知污水排放位置;若污水排入地下,由于信号传输受阻,无法收到定位信息或长时间后才收到,则可判断存在偷排行为;
Step3.检测到污水最终排放位置后,通过远程控制无人废水治理船到达排放位置,利用废水成分检测传感器进行重金属离子分析,根据分析结果释放不同的中和剂或沉淀剂,最大限度的将污染在排污源头解决。
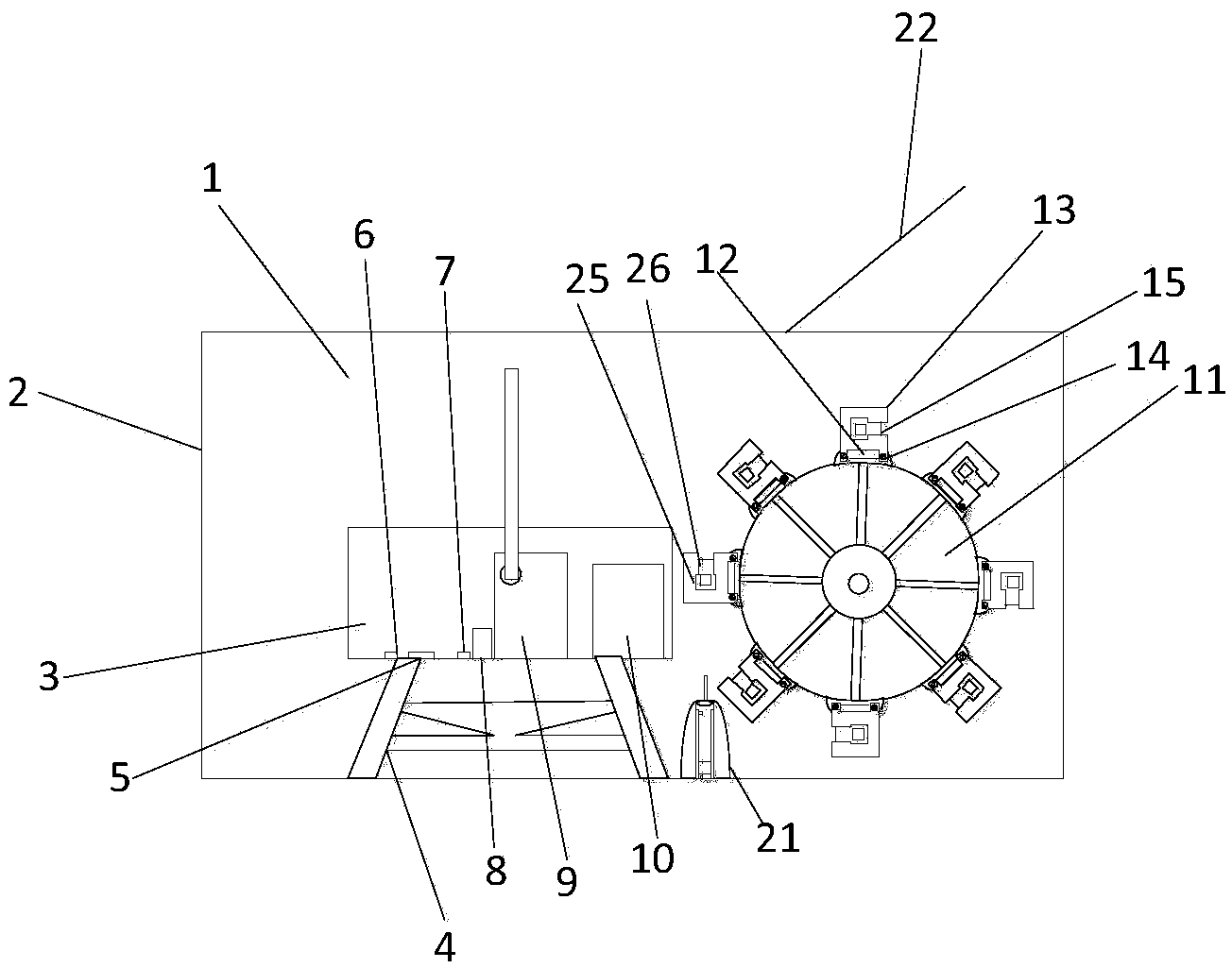
2.一种废水排放流向检测装置,其特征在于:所述流向检测装置(1)包括不锈钢外壳(2),控制盒(3),支架(4),STM32芯片(5),卡槽Ⅰ(6),通信模块(7),同步器Ⅰ(8),抓取装置(9),蓄电池(10),转轮(11),磁铁(12),放置架(13),螺丝(14),检测球投放器(15),转轴Ⅰ(16),轴承(17),传动齿轮Ⅰ(18),电机Ⅰ(19).传动齿轮Ⅱ(20),启动器(21),上盖(22),投放口(23),隔板(24),方孔Ⅰ(25),槽Ⅰ(26),检测球(27),后部光学限位器(28),前部光学限位器(29);其中不锈钢外壳(2)为空心长方体,其前部下方开有矩形投放口(23),后部上方开有上盖(22);控制盒(3)安装在投放口(23)后方,其底部安装有支架(4);STM32芯片(5)安装在控制盒(3)内前部左侧,卡槽Ⅰ(6)安装在STM32芯片(5)的左下方,通信模块(7)安装在STM32芯片(5)的右上方;同步器Ⅰ(8)安装在控制盒(3)内前部右侧;抓取装置(9)安装在控制盒(3)内中部,其两端从控制盒(3)的孔中伸出;两块蓄电池(10)安装在控制盒(3)内后部;转轮(11)安装在控制盒(3)后部,转轮(11)边缘每隔45度安装有一块磁铁(12),共八块磁铁(12);放置架(13)为PVC塑料板制成,外部由三面围城矩形,内部中空,其顶部与背部为空,底部两侧安装有隔板(24),放置架(13)两侧开有方孔(25),方孔Ⅰ(25)顶部开有槽Ⅰ(26);螺丝(14)将放置架(13)背部固定在磁铁(12)上;检测球投放器(15)放在放置架(13)中并被磁铁(12)吸牢;两个检测球(27)放置检测球投放器(15)中;在转轴Ⅰ(16)穿过转轮(11),其两端与位于流向检测装置(1)两侧内壁的轴承(17)相连;传动齿轮Ⅰ(18)安装在转轴Ⅰ(16)左侧;电机Ⅰ(19)安装在左侧轴承(17)后部,其上的传动齿轮Ⅱ(20)与传动齿轮Ⅰ(18)相契合;启动器(21)安装在流向检测装置(1)底部,位于控制盒(3)与转轮(11)之间;后部光学限位器(28)与前部光学限位器(29)均包含有成对的发射器和接收器,后部光学限位器(28)的发射器安装在控制盒(3)后部右侧的外壁上,接收器安装在不锈钢外壳(2)后部右侧的内壁上,接收器和发射器相互对应,其高度与抓取装置(9)伸出控制盒(3)的孔高度一致;前部光学限位器(29)的发射器安装在控制盒(3)前部左侧的外壁上,接收器安装在不锈钢外壳(2)前部左侧的内壁上,接收器和发射器相互对应,其高度与抓取装置(9)伸出控制盒(3)的孔高度一致;STM32芯片(5)、抓取装置(9)、电机Ⅰ(19)和启动器(21)与蓄电池(10)连接;STM32芯片(5)与卡槽(6)、通信模块(7)、同步器(8)、抓取装置(9)、电机Ⅰ(19)、启动器(21)连接;同步器(8)与抓取装置(9)相连。
3.根据权利要求2所述的一种废水排放流向检测装置,其特征在于:所述抓取装置(9)包括PVC外壳(901),转轴Ⅱ(902),传动齿轮Ⅲ(903),旋转臂(904),抓取臂(905),滑轨Ⅰ(906),带齿板(907),传动齿轮Ⅳ(908),转轴Ⅲ(909),伞状齿轮Ⅰ(910),伞状齿轮Ⅱ(911),电机Ⅱ(912),转轴Ⅳ(913),传动齿轮Ⅴ(914),传动齿轮Ⅵ(915),电机Ⅲ(916),传动齿轮Ⅶ(917),槽Ⅱ(918),收缩限位器(919),伸出限位器(920);其中转轴Ⅱ(902)安装在PVC外壳(901)前部,传动齿轮Ⅲ(903)安装在转轴Ⅱ(902)中部;转轴Ⅱ(902)两端连接有旋转臂(904),旋转臂(904)为中空方形,其上、左、下内壁上安装有滑轨Ⅰ(906),右侧开有槽Ⅱ(918);两根抓取臂(905)为实心方柱,呈“匚”形,顶端与放置架(13)上的方孔(25)位置对应,低端位于旋转臂(904)内并嵌入在滑轨Ⅰ(906)中,其右侧安装有带齿板(907),与槽Ⅱ(918)对应;滑轨Ⅰ(906)靠近里侧的一端安装有收缩限位器(919),靠近外侧的一端安装有伸出限位器(920);旋转臂(904)外侧底部安装有电机Ⅱ(912),电机Ⅱ(912)上的伞状齿轮Ⅱ(911)与伞状齿轮Ⅰ(910)相契合;伞状齿轮Ⅰ(910)安装在转轴Ⅲ(909)底部,转轴Ⅲ(909)顶部安装有传动齿轮Ⅳ(908);传动齿轮Ⅳ(908)与抓取臂(905)右侧的带齿板(907)契合;转轴Ⅳ(913)安装在转轴Ⅱ(902)后部,其中部安装有传动齿轮Ⅴ(914),传动齿轮Ⅴ(914)与传动齿轮Ⅲ(903)契合;传动齿轮Ⅵ(915)安装在传动齿轮Ⅴ(914)左侧;电机Ⅲ(916)安装在PVC外壳(901)外部左后侧,其上的传动齿轮Ⅶ(917)位于PVC外壳(901)内部,并与传动齿轮Ⅵ(915)契合。
4.根据权利要求2所述的一种废水排放流向检测装置,其特征在于:所述检测球投放器(15)包括木质外壳(1501),铁板(1502),方孔Ⅱ(1503),开合器(1504),滑轨Ⅲ(1505),夹臂(1506),活动轴(1507),弹簧Ⅰ(1508);其中木质外壳(1501)呈长方柱形,中部为空,背部安装有铁板(1502);木质外壳(1501)左右两侧开有横向T形槽,横向T形槽从木质外壳(1501)两侧深入到其中空内部,横向T形槽外侧开有方孔Ⅱ(1503),方孔Ⅱ(1503)内安装有滑轨Ⅲ(1505);开合器(1504)嵌入在滑轨Ⅲ(1505)上;夹臂(1506)位于开合器(1504)右侧,从横向T形槽内伸出到中空内部,其前部围成圆形,中部安装有弹簧Ⅰ(1508),后部用活动轴(1507)固定在横向T形槽内,开合器(1504)压向夹臂(1506)后部可实现后部的开合。
5.根据权利要求2所述的一种废水排放流向检测装置,其特征在于:所述检测球(27)包括上部气泡外壳(2701),下部气泡外壳(2702),天线(2703),电路板放置架(2704),双面电路板Ⅰ(2705),双面电路板Ⅱ(2706),双面电路板Ⅲ(2707),过线槽(2708),卡槽Ⅱ(2709),锂电池(2710),定位芯片(2711),触发开关(2712),启动开关(2713),限位片(2714),弹簧Ⅱ(2715),升压电路(2716),增重块(2717);其中上部气泡外壳(2701)与下部气泡外壳(2702)上的气泡形状均为六边形,两者均为耐腐蚀塑料制成,截面厚度为0.5mm,上部气泡外壳(2701)的下部边缘与下部气泡外壳(2702)上部边缘均向内凹陷,使用热熔将两者粘合起来,上部气泡外壳(2701)的顶部与下部气泡外壳(2702)的底部均开有孔;下部气泡外壳(2702)内部安装有电路板放置架(2704),其形状与下部气泡外壳(2702)内壁形状吻合;电路板放置架(2704)从上而下安装有三层双面电路板,分别为双面电路板Ⅰ(2705)、双面电路板Ⅱ(2705)和双面电路板Ⅲ(2705);三层双面电路板之间开有过线槽(2708),方面层间电路进行连接;卡槽Ⅱ(2709)安装在双面电路板Ⅰ(2705)上方;升压电路(2716)安装在双面电路板Ⅰ(2705)上方,卡槽Ⅱ(2709)右侧;锂电池(2710)安装在双面电路板Ⅱ(2705)上方,定位芯片(2711)安装在双面电路板Ⅲ(2705)上方,触发开关(2712)安装在双面电路板Ⅲ(2705)下方;启动开关(2713)从电路板放置架(2704)底部穿出,其中间安装有限位片(2714),弹簧Ⅱ(2715)一端固定在触发开关(2712)上,另一端套在启动开关(2713)上部,被限位片(2714)所阻挡;天线(2703)安装在上部气泡外壳(2701)的顶部;锂电池(2710)与升压电路(2716)、触发开关(2712)连接;升压电路(2716)与卡槽Ⅱ(2709)、定位芯片(2711)连接;卡槽Ⅱ(2709)、天线(2703)与定位芯片(2711)连接。
6.根据权利要求2所述的一种废水排放流向检测装置,其特征在于:所述启动器(21)包括滑轨Ⅲ(2101),电机Ⅳ(2102),丝杠(2103),螺母(2104),限位器(2105),同步器Ⅱ(2106);其中启动器(21)中开有两个平行的槽,槽中安装有滑轨Ⅲ(2101);两个电机Ⅳ(2102)安装在滑轨Ⅲ(2101)中;两根丝杠(2103)分别与两个电机Ⅳ(2102)连接;螺母(2104)穿过丝杠(2103)固定在两个槽的顶部,其中一个槽中的滑轨Ⅲ(2101)顶部与底部安装有限位器(2105);同步器Ⅱ(2106)安装在两个槽之间,并与两个电机Ⅳ(2102)、STM32芯片(5)连接。
7.一种废水治理装置,其特征在于:所述无人废水治理船包括船体(30),气筏(31),中和剂存储罐(32),ARM9集成控制板(33),收发天线(34),全角度摄像头(35),蓄电池组(36),风力发电器(37),浆片(38),推进器(39),舵机(40),开合板(41),滤网(42),重金属检测传感器(43),开合电机(44),电磁阀(45),释放器(46),防腐蚀管路(47);其中船体(30)总体呈矩形,前部突出,船体(30)表面覆盖有太阳能板;两个中和剂存储罐(32)安装在船体(30)中前部内侧;ARM9集成控制板(33)安装在船体(30)中部内侧,位于中和剂存储罐(32)后部;收发天线(34)安装在ARM9集成控制板(33)左侧;全角度摄像头(35)安装在ARM9集成控制板(33)右侧;两个蓄电池组(36)安装在船体(30)后部内侧;风力发电器(37)安装在船体(30)后部外表面;推进器(39)安装在船体(30)后部底侧(38),浆片与推进器(39)连接;舵机(40)安装在船体(30)后部底侧(38),推进器(39)前方;开合板(41)位于船体(30)突出部底侧,由安装在突出部内侧的开合电机(44)控制;开合板(41)上安装滤网(42);滤网(42)中有重金属检测传感器(43);两个中和剂存储罐(32)下方分别安装有防腐蚀管路(47),两个电磁阀(45)分别安装在防腐蚀管路(47)上;释放器(46)安装在防腐蚀管路(47)底部,呈扁平圆柱形,其边缘具有突起的叶轮,叶轮间开有小孔;ARM9集成控制板(33)与收发天线(34)、全角度摄像头(35)、蓄电池组(36)、风力发电器(37)、推进器(39)、舵机(40)、重金属检测传感器(43)、开合电机(44)和电磁阀(45)相连;蓄电池组(36)与ARM9集成控制板(33)、全角度摄像头(35)、风力发电器(37)、推进器(39)、舵机(40)、开合电机(44)以及船体(30)表面的太阳能板相连。
8.根据权利要求7所述的一种废水治理装置,其特征在于:所述风力发电器(37)包括固定座(3701),防护罩(3702),旋转叶片(3703),转动轴(3704),发电模块(3705);其中固定座(3701)中部为圆形,底部固定在船体(30)上;防护罩(3702)通过转动轴(3704)安装在固定座(3701)上的中空圆形中,旋转叶片(3703)安装在防护罩(3702)内并与发电模块(3705)相连;发电模块(3705)与蓄电池组(36)连接。
说明书
一种废水排放流向检测与治理方法及装置
技术领域
本发明属于废水治理领域,涉及一种废水排放流向检测与治理方法及装置。
背景技术
工业废水是造成环境污染,特别是水体污染的重要原因。主要是指工业生产过程中所产生的废水和废液,包括工艺过程排水、机械设备冷却水、设备和场地洗涤水等。工业废水含有的成分,主要取决于在生产过程中所用的原材料。不同的工业,产生不同性质的废水,同类工业如果采用不同的生产工艺,废水性质也不同。一般可分为工业冷却水和工艺废水。工业冷却水与原料不直接接触,只要回收热量或稍加处理就能循环利用。工艺废水直接与原料接触,多半具有危害性。按其成分又可分为含无机物废水、有机物废水和有机、无机物的混合废水。具体来看,工业废水中污染物成分复杂、种类多,有机污染物浓度较高,含有氨氮、石油类、挥发酚和重金属等有害有毒物质。一般常以废水中含量较多或危害较大的某一种成分或毒物来命名,如含汞废水、含铬废水、含铅废水等。
发明内容
鉴于现有技术中所存在的问题,本发明公开了一种废水排放流向检测与废水治理方法,由以下步骤组成:
Step1.将流向检测装置安装在排污管起始端或污水池上部,利用远程控制向排污管或污水池中释放检测球;
Step2.检测球随污水共同排放,若污水排入河流中,利用检测球中的定位装置可准确得知污水排放位置;若污水排入地下,由于信号传输受阻,无法收到定位信息或长时间后才收到,则可判断存在偷排行为;
Step3.检测到污水最终排放位置后,通过远程控制无人废水治理船到达排放位置,利用废水成分检测传感器进行重金属离子分析,根据分析结果释放不同的中和剂或沉淀剂,最大限度的将污染在排污源头解决。
一种废水排放流向检测装置,所述流向检测装置包括不锈钢外壳,控制盒,支架,STM32芯片,卡槽Ⅰ,通信模块,同步器Ⅰ,抓取装置,蓄电池,转轮,磁铁,放置架,螺丝,检测球投放器,转轴Ⅰ,轴承,传动齿轮Ⅰ,电机Ⅰ.传动齿轮Ⅱ,启动器,上盖,投放口,隔板,方孔Ⅰ,槽Ⅰ,检测球;其中不锈钢外壳为空心长方体,其前部下方开有矩形投放口,后部上方开有上盖;控制盒安装在投放口后方,其底部安装有支架;STM芯片安装在控制盒内前部左侧,卡槽Ⅰ安装在STM芯片的左下方,通信模块安装在STM芯片的右上方;同步器Ⅰ安装在控制盒内前部右侧;抓取装置安装在控制盒内中部;两块蓄电池安装在控制盒内后部;转轮安装在控制盒后部,转轮边缘每隔度安装有一块磁铁,共八块磁铁;放置架为PVC塑料板制成,外部由三面围城矩形,内部中空,其顶部与背部为空,底部两侧安装有隔板,放置架两侧开有方孔,方孔Ⅰ顶部开有槽Ⅰ;螺丝将放置架背部固定在磁铁上;检测球投放器放在放置架中并被磁铁吸牢;两个检测球放置检测球投放器中;在转轴Ⅰ穿过转轮,其两端与位于流向检测装置两侧内壁的轴承相连;传动齿轮Ⅰ安装在转轴Ⅰ左侧;电机Ⅰ安装在左侧轴承后部,其上的传动齿轮Ⅱ与传动齿轮Ⅰ相契合;启动器安装在流向检测装置底部,位于控制盒与转轮之间;后部光学限位器与前部光学限位器均包含有成对的发射器和接收器,后部光学限位器的发射器安装在控制盒后部右侧的外壁上,接收器安装在不锈钢外壳后部右侧的内壁上,接收器和发射器相互对应,其高度与抓取装置伸出控制盒的孔高度一致;前部光学限位器的发射器安装在控制盒前部左侧的外壁上,接收器安装在不锈钢外壳前部左侧的内壁上,接收器和发射器相互对应,其高度与抓取装置伸出控制盒的孔高度一致;STM32芯片、抓取装置、电机Ⅰ和启动器与蓄电池连接;STM32芯片与卡槽、通信模块、同步器、抓取装置、电机Ⅰ、启动器连接;同步器与抓取装置相连。
所述抓取装置包括PVC外壳,转轴Ⅱ,传动齿轮Ⅲ,旋转臂,抓取臂,滑轨Ⅰ,带齿板,传动齿轮Ⅳ,转轴Ⅲ,伞状齿轮Ⅰ,伞状齿轮Ⅱ,电机Ⅱ,转轴Ⅳ,传动齿轮Ⅴ,传动齿轮Ⅵ,电机Ⅲ,传动齿轮Ⅶ,槽Ⅱ,收缩限位器,伸出限位器;其中转轴Ⅱ安装在PVC外壳前部,传动齿轮Ⅲ安装在转轴Ⅱ中部;转轴Ⅱ两端连接有旋转臂,旋转臂为中空方形,其上、左、下内壁上安装有滑轨Ⅰ,右侧开有槽Ⅱ;两根抓取臂为实心方柱,呈“匚”形,顶端与放置架上的方孔位置对应,低端位于旋转臂内并嵌入在滑轨Ⅰ中,其右侧安装有带齿板,与槽Ⅱ对应;滑轨Ⅰ靠近里侧的一端安装有收缩限位器,靠近外侧的一端安装有伸出限位器;旋转臂外侧底部安装有电机Ⅱ,电机Ⅱ上的伞状齿轮Ⅱ与伞状齿轮Ⅰ相契合;伞状齿轮Ⅰ安装在转轴Ⅲ底部,转轴Ⅲ顶部安装有传动齿轮Ⅳ;传动齿轮Ⅳ与抓取臂右侧的带齿板契合;转轴Ⅳ安装在转轴Ⅱ后部,其中部安装有传动齿轮Ⅴ,传动齿轮Ⅴ与传动齿轮Ⅲ契合;传动齿轮Ⅵ安装在传动齿轮Ⅴ左侧;电机Ⅲ安装在PVC外壳外部左后侧,其上的传动齿轮Ⅶ位于PVC外壳内部,并与传动齿轮Ⅵ契合。
所述检测球投放器包括木质外壳,铁板,方孔Ⅱ,开合器,滑轨Ⅲ,夹臂,活动轴,弹簧Ⅰ;其中木质外壳呈长方柱形,中部为空,背部安装有铁板;木质外壳左右两侧开有横向T形槽,横向T形槽从木质外壳两侧深入到其中空内部,横向T形槽外侧开有方孔Ⅱ,方孔Ⅱ内安装有滑轨Ⅲ;开合器嵌入在滑轨Ⅲ上;夹臂位于开合器右侧,从横向T形槽内伸出到中空内部,其前部围成圆形,中部安装有弹簧Ⅰ,后部用活动轴固定在横向T形槽内,开合器压向夹臂后部可实现后部的开合。
所述检测球包括上部气泡外壳,下部气泡外壳,天线,电路板放置架,双面电路板Ⅰ,双面电路板Ⅱ,双面电路板Ⅲ,过线槽,卡槽Ⅱ,锂电池,定位芯片,触发开关,启动开关,限位片,弹簧Ⅱ,升压电路,增重块;其中上部气泡外壳与下部气泡外壳上的气泡形状均为六边形,两者均为耐腐蚀塑料制成,截面厚度为.mm,上部气泡外壳的下部边缘与下部气泡外壳上部边缘均向内凹陷,使用热熔将两者粘合起来,上部气泡外壳的顶部与下部气泡外壳的底部均开有孔;下部气泡外壳内部安装有电路板放置架,其形状与下部气泡外壳内壁形状吻合;电路板放置架从上而下安装有三层双面电路板,分别为双面电路板Ⅰ、双面电路板Ⅱ和双面电路板Ⅲ;三层双面电路板之间开有过线槽,方面层间电路进行连接;卡槽Ⅱ安装在双面电路板Ⅰ上方;升压电路安装在双面电路板Ⅰ上方,卡槽Ⅱ右侧;锂电池安装在双面电路板Ⅱ上方,定位芯片安装在双面电路板Ⅲ上方,触发开关安装在双面电路板Ⅲ下方;启动开关从电路板放置架底部穿出,其中间安装有限位片,弹簧Ⅱ一端固定在触发开关上,另一端套在启动开关上部,被限位片所阻挡;天线安装在上部气泡外壳的顶部;锂电池与升压电路、触发开关连接;升压电路与卡槽Ⅱ、定位芯片连接;卡槽Ⅱ、天线与定位芯片连接。
所述启动器包括滑轨Ⅲ,电机Ⅳ,丝杠,螺母,限位器,同步器Ⅱ;其中启动器中开有两个平行的槽,槽中安装有滑轨Ⅲ;两个电机Ⅳ安装在滑轨Ⅲ中;两根丝杠分别与两个电机Ⅳ连接;螺母穿过丝杠固定在两个槽的顶部,其中一个槽中的滑轨Ⅲ顶部与底部安装有限位器;同步器Ⅱ安装在两个槽之间,并与两个电机Ⅳ、STM芯片连接。
一种废水治理装置,所述无人废水治理船包括船体,气筏,中和剂存储罐,ARM9集成控制板,收发天线,全角度摄像头,蓄电池组,风力发电器,浆片,推进器,舵机,开合板,滤网,重金属检测传感器,开合电机,电磁阀,释放器,防腐蚀管路;其中船体总体呈矩形,前部突出,船体表面覆盖有太阳能板;两个中和剂存储罐安装在船体中前部内侧; ARM9集成控制板安装在船体中部内侧,位于中和剂存储罐后部;收发天线安装在ARM9集成控制板左侧;全角度摄像头安装在ARM9集成控制板右侧;两个蓄电池组安装在船体后部内侧;风力发电器安装在船体后部外表面;推进器安装在船体后部底侧,浆片与推进器连接;舵机安装在船体后部底侧,推进器前方;开合板位于船体突出部底侧,由安装在突出部内侧的开合电机控制;开合板上安装滤网;滤网中有重金属检测传感器;两个中和剂存储罐下方分别安装有防腐蚀管路,两个电磁阀分别安装在防腐蚀管路上;释放器安装在防腐蚀管路底部,呈扁平圆柱形,其边缘具有突起的叶轮,叶轮间开有小孔;ARM9集成控制板与收发天线、全角度摄像头、蓄电池组、风力发电器、推进器、舵机、重金属检测传感器、开合电机和电磁阀相连;蓄电池组与ARM9集成控制板、全角度摄像头、风力发电器、推进器、舵机、开合电机以及船体表面的太阳能板相连。
所述风力发电器包括固定座,防护罩,旋转叶片,转动轴,发电模块;其中固定座中部为圆形,底部固定在船体上;防护罩通过转动轴安装在固定座上的中空圆形中,旋转叶片安装在防护罩内并与发电模块相连;发电模块与蓄电池组连接。
本发明的有益效果:
本发明将流向检测装置安装在排污管最前端或污水池上,对其进行远程控制释放检测球,流向检测装置中的抓取装置可将转轮上放置有检测球的检测球投放器取下,并用启动器将其激活;检测球进入污水中后随污水排放,若排放至河流或污水坑等露天处,则可通过检测球中的定位系统得到排放位置,若长时间未收到定位信号,则因信号传输受阻,可判断为排放至地下;获得排放位置后可将无人废水治理船运至河流或污水坑中,针对污水源头中的重金属含量不同,释放不同的中和剂或沉淀剂,消除重金属离子,当药剂使用殆尽时可驶回岸边手动补充,避免污染范围的扩大,并可利用船体自带的风力和太阳能补充电能,提高续航力。





