
申请日2017.02.23
公开(公告)日2017.06.13
IPC分类号C02F1/00
摘要
本发明提供了一种用于湖泊污水净化处理的智能机器人系统,包括污水探测模块、投料机器人、无线通信模块、控制模块和监控中心;所述污水探测模块通过无线通信模块连接至监控中心,所述投料机器人连接控制模块,控制模块连接监控中心;所述污水探测模块用于探测湖泊的污水情况,生成污水探测数据并传送至监控中心,所述监控中心对污水探测模块传送的污水探测数据进行分析,生成包含投料浓度、投料量和投料位置的投料指令,所述控制模块根据投料指令控制投料机器人投放化学净化药物。本发明在污水处理净化过程中,可实现污水净化自动投料的功能,不需要人工乘船向污水中投放化学药物,节省人力物力。
权利要求书
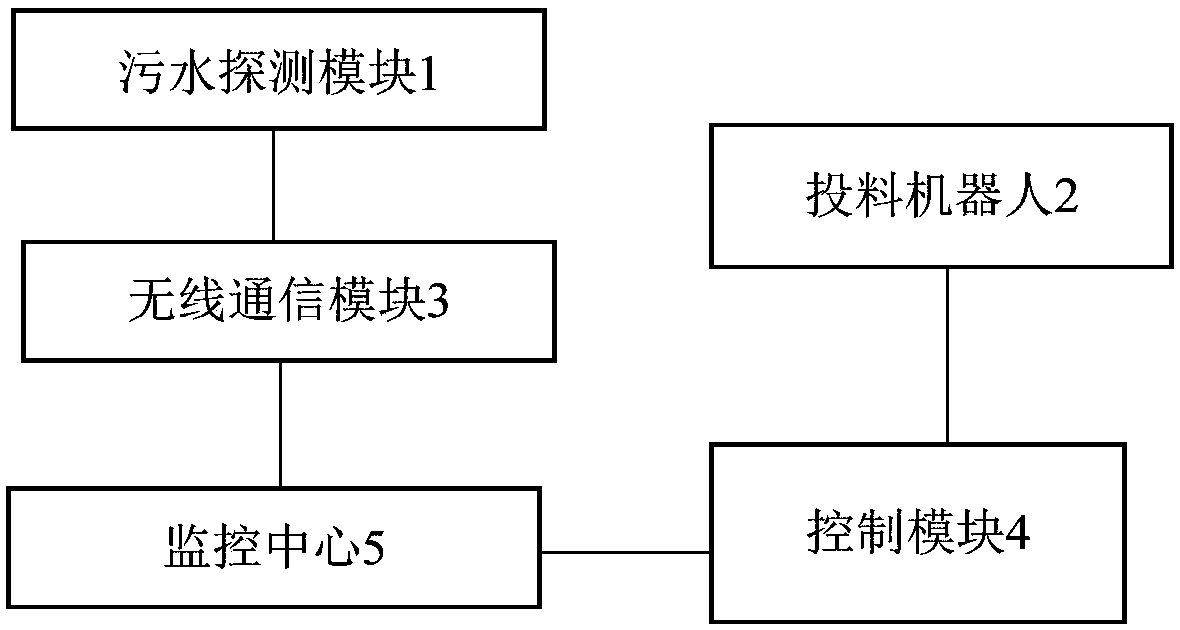
1.一种用于湖泊污水净化处理的智能机器人系统,其特征是,包括污水探测模块、投料机器人、无线通信模块、控制模块和监控中心;所述污水探测模块通过无线通信模块连接至监控中心,所述投料机器人连接控制模块,控制模块连接监控中心;所述污水探测模块用于探测湖泊的污水情况,生成污水探测数据并传送至监控中心,所述监控中心对污水探测模块传送的污水探测数据进行分析,生成包含投料浓度、投料量和投料位置的投料指令,所述控制模块根据投料指令控制投料机器人投放化学净化药物。
2.根据权利要求1所述的一种用于湖泊污水净化处理的智能机器人系统,其特征是,所述投料机器人设有行走单元和导航控制单元,所述导航控制单元用于控制行走单元运动至投料指令中指定的投料位置。
3.根据权利要求2所述的一种用于湖泊污水净化处理的智能机器人系统,其特征是,所述投料机器人还设有投料单元,所述的投料单元包括投料台座、投料机构以及储料筒;所述的投料机构沿投料台座的中心轴线分别对称布置,储料筒位于投料台座上端中心位置处。
4.根据权利要求3所述的一种用于湖泊污水净化处理的智能机器人系统,其特征是,所述探测湖泊的污水情况,包括对湖泊的水质进行探测,对湖泊的污染源进行探测。
5.根据权利要求4所述的一种用于湖泊污水净化处理的智能机器人系统,其特征是,对湖泊的污染源的探测,具体包括:(1)采集各传感器节点的坐标,考虑到所需净化的湖泊上的传感器节点的漂浮移动的影响,对所需净化的湖泊上的传感器节点的坐标进行修正;(2)计算传感器节点在设定时间内采集的浓度平均值,根据浓度平均值计算传感器节点坐标到污染源坐标的距离,然后根据传感器节点坐标到污染源坐标的距离求出污染源的坐标,完成污染源的定位;(3)将污染源的坐标发送至监控中心。
6.根据权利要求5所述的一种用于湖泊污水净化处理的智能机器人系统,其特征是,根据传感器节点坐标到污染源坐标的距离求出污染源的坐标,具体包括:设污染源坐标为X=(xw,yw),设定水污染源在扩散时为各向同性,考虑所需净化的湖泊的边界对污染源污染扩散的影响,引入近岸约束权值M,则污染源坐标定位公式定义为:
式中
式中,x1,…,xn-1,xn为各传感器节点的横坐标,y1,…,yn-1,yn为各传感器节点的纵坐标,S1,…,Sn-1,Sn为各传感器节点坐标到污染源坐标的距离;λT为λ的转置。
说明书
一种用于湖泊污水净化处理的智能机器人系统
技术领域
本发明涉及机器人设计领域,具体涉及一种用于湖泊污水净化处理的智能机器人系统。
背景技术
目前对于污水治理的方法有物理法、化学法和生物法,其中化学法治理污水就是向污水中投放化学药物,利用化学反应或物理化学作用净化污水,目前对于水库、湖泊、河流、池塘等地的化学法净化污水的方式都是人工乘船向污水中投放化学药物,这样不仅占用了大量的劳动力,投放效率低,而且具有一定的危险性。
发明内容
针对上述问题,本发明旨在提供一种用于湖泊污水净化处理的智能机器人系统。
本发明的目的采用以下技术方案来实现:
一种用于湖泊污水净化处理的智能机器人系统,包括污水探测模块、投料机器人、无线通信模块、控制模块和监控中心;所述污水探测模块通过无线通信模块连接至监控中心,所述投料机器人连接控制模块,控制模块连接监控中心;所述污水探测模块用于探测湖泊的污水情况,生成污水探测数据并传送至监控中心,所述监控中心对污水探测模块传送的污水探测数据进行分析,生成包含投料浓度、投料量和投料位置的投料指令,所述控制模块根据投料指令控制投料机器人投放化学净化药物。
本发明的有益效果为:在污水处理净化过程中,可实现污水净化自动投料的功能,不需要人工乘船向污水中投放化学药物,节省人力物力。





