
申请日2017.02.23
公开(公告)日2017.06.06
IPC分类号G05B13/04
摘要
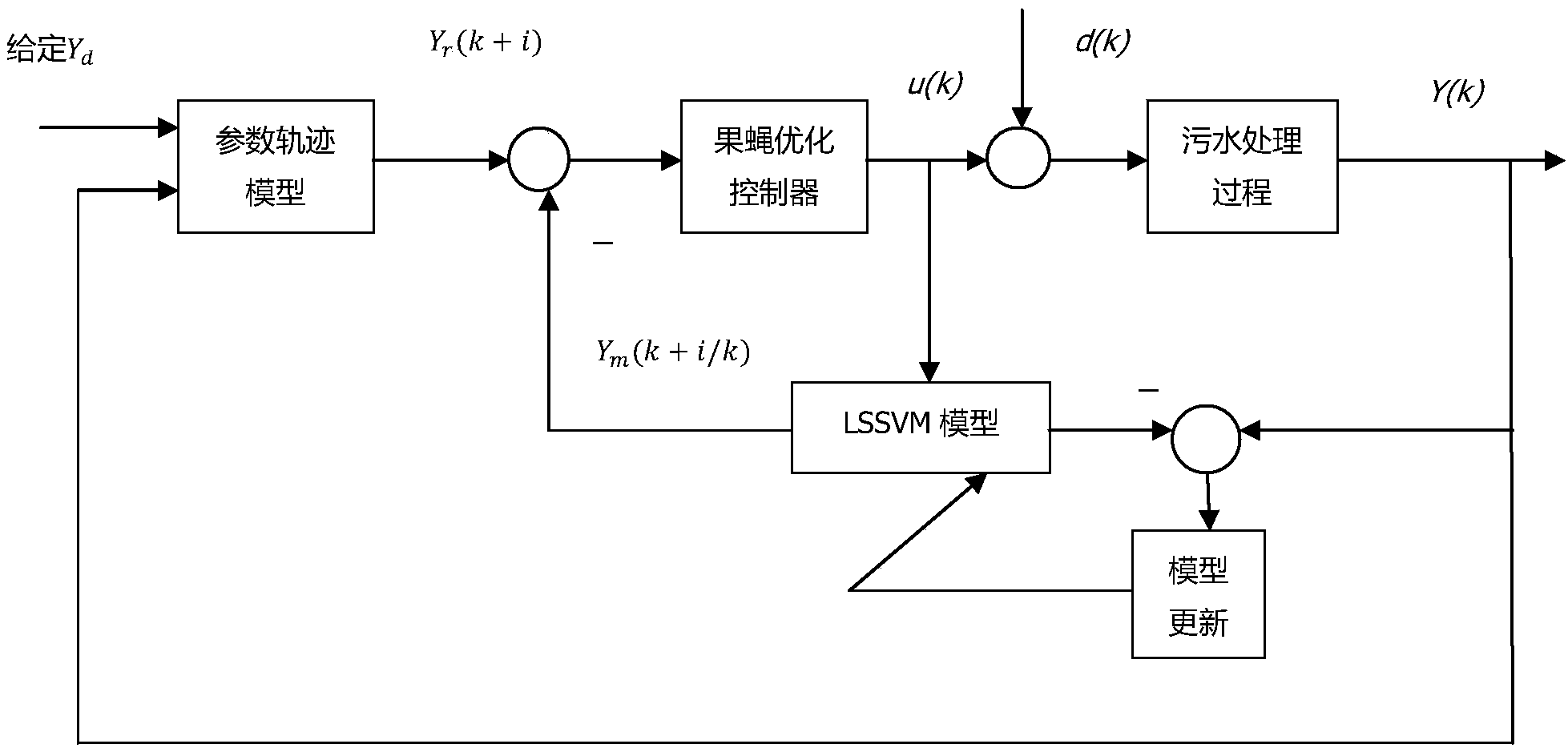
本发明的目的是针对现有技术中所存在的不足,发明一种污水处理过程基于果蝇优化和最小二乘支持向量机(LSSVM)模型优化控制方法,通过采集污水过程数据,建立包含污水过程溶解氧和硝态氮系统模型,准确描述系统实时状态,采用果蝇算法进行滚动优化,将控制目标及各种约束体现在优化性能指标中,并根据实时数据在线更新模型。实现了污水处理过程的流程优化控制,能根据控制情况及时调整控制量,保证控制过程的稳定,而且能够根据过程的变化情况进行优化控制,使污水处理过程能耗降低。
权利要求书
1.一种基于果蝇优化和支持向量机模型的污水过程优化控制方法,其特征在于包括两个部分,一部分是果蝇优化算法,另一部分是基于最小二乘支持向量机的预测模型及更新算法,设系统第k步柔化给定yr(k+j)和模型预测输出ym(k+j/k)的偏差为:
e(k+j)=yr(k+j)-ym(k+j/k) (1)
j=1,2,...,M为预测步长,优化控制器的任务是使用优化算法获得如式(2)所示的目标函数的最小值:
并且需要满足系统的控制约束和输出约束:
式(2)中,Mp为最大预测长度;Nu为控制长度;λ为控制加权系数,当不满足约束时,γ=1,目标函数加上一个大的惩罚值C,满足约束时γ=0;yr(k+j)为经过柔化的参考给定:
式(4)中,Tr为参考轨迹时间常数;TS为采样时间;yd为设定值向量,yd,NO为硝态氮SNO,2的给定,yd,O为溶解氧SO,5的给定,α为滤波常数矩,k=1,2,…,np。
对应式(2)最小值的未来控制量为:
u(k+j)=(u1(k+j),u2(k+j),…,ul(k+j))T (5)
式(5)中,j=1,2,...,Nu,l为控制量的维数。
优化控制方法包括以下步骤:
步骤一、采集污水过程实时数据,通过标准的LSSVM学习算法离线获得包含污水过程溶解氧和硝态氮系统模型,并在过程控制器中编程实现
步骤二、采集过程实时数据,根据上一时刻的硝态氮浓度SNO,2(k-1)、上一时刻的溶解氧浓度SO,5(k-1)和给定yd计算k时刻的参考值yr(k),计算公式如式(4)所示,将实时采集过程数据送给模型输入。
步骤三、调用果蝇优化控制算法,代入步骤二中的参数,不断调用基于LSSVM的预测模型,计算目标函数适应值,得出目标函数最优控制量。
步骤四、果蝇优化控制器输出最优解。令k=k+1,进入下一采样时刻。如果更新间隔时间到,将最新采集的数据加入到训练集中,将相同时间长度的最老数据从训练集删除,根据模型误差情况通过新采集的滚动窗口数据通过LSSVM训练算法更新模型。
果蝇优化控制算法在每一采样时刻的具体工作步骤如下:
Step1:初始化。确定种群数量sizepop,最大迭代次数maxgen等算法参数,并对果蝇种群的初始位置(X1axis,Y1axis),(X2axis,Y2axis)初始化。
Step2:嗅觉随机搜索。令初始代数g=0;设定迭代过程中果蝇个体在嗅觉觅食阶段的随机飞行方向的区间和搜索步长的区间,搜索步长RandomValue在搜索步长区间内随机产生,则有:
Step3:初步计算。在无法得知食物的具体坐标的情况下,只能通过计算个体与坐标原点的距离来求味道浓度的判定Si。具体公式如下:
其中a1,a2为范围系数。
Step4:计算个体的气味浓度值。令Qa(k)=S1i,kLa(k)=S2i将k时刻状态量(SNO,2(k),SO,5(k))、五号池的爆气量(氧转移系数kLa,5(k))和回流量Qa(k)代入味道浓度判断函数(2),计算每个果蝇个体的气味浓度值:
smelli=fitness(Qa(k),kLa,5(k)) (8)
Step5:根据气味浓度值,找出当前种群中气味浓度值最小的个体:
[bestSmell,bestindex]=min(smell) (9)
Step6:视觉定位。记录并保留最佳味道浓度值bestSmell和此时的最优果蝇个体的坐标,同时所有个体依赖视觉飞往最优个体的位置:
Step7:迭代寻优。首先判断是否达到终止条件g=maxgen。当g 采用支持向量机建立污水处理过程模型,采用两个控制量内回流流量(Qa),x1,曝气流量(kLa,5)x2以及进水化学需氧量(COD)x3、进水生化需氧量(BOD5)x4、进水悬浮固体浓度(SS)x5、进水总磷(TP)x6、进水氨氮(NH3-N)x7、进水总氮(TP)x8、进水水温x9、进水pH值x10、进水水量x11、悬浮物MLSSx12、氧化还原电位(ORP)x13作为输入变量,以上x3-x13过程变量如不能实时采集,则不纳入输入变量。对原始数据进行预处理,利用主元分析方法对样本属性进行降维,重构出新的训练样本集;构造输入变量Xk=[x1,k,x1,k-1,x2,k,x2,k-1,…,x13,k,x13,k-1],其中xi,k表示xi变量k时刻值,xi,k-1为前一时刻值。出水硝态氮浓度SNO,2和溶解氧SO,5以及出水COD、BOD5、SS、TN作为模型输出。 根据历史和实验数据,取时间窗口宽度k=1,2,…,N构成训练数据,通过支持向量学习得到输入输出模型,一步预测输出: 式中K(xi,x)核函数取径向基函数;b为偏置;αi和为拉格朗日乘子,xi为支持向量,La为支持向量个数。多步预测输出可由一步预测输出往后递推得到。 在线运行到达更新周期后,将新采集的时间序列数据XN+j,j=1,2,…,p,p为更新时间周期数时,加入训练数据,舍弃老数据Xj,当时间窗口宽度误差和η为一预先确定的正数,启动更新后窗口数据对支持向量机训练,从而完成模型的在线更新和校正。 2.根据权利要求1所述的一种基于果蝇优化和支持向量机模型的污水过程优化控制方法和系统,其特征在于 在线运行到达更新周期后,将新采集的时间序列数据XN+j,j=1,2,…,p,p为更新时间周期数时,加入训练数据,舍弃老数据Xj,当时间窗口宽度误差和η为一预先确定的正数,启动更新后窗口数据对支持向量机训练,从而完成模型的在线更新和校正。 说明书 一种基于果蝇优化和LSSVM的污水过程优化控制方法 技术领域 本发明属于污水处理领域,更具体地说,涉及一种污水处理优化控制方法。 背景技术 随着人口数量的持续增长和现代工业的高速发展,对用水需求增加的同时伴随着水环境的严重污染,面对这一矛盾,污水处理成为了我国近年来基本建设投资的重点。现有的污水未经深度处理远远不能满足达标排放的标准,未达标的排放会对地下水资源产生巨大的污染并对环境产生深远的影响。基于环境保护和节约用水,节水的最重要环节就是污水的再利用,尽管全国648个城市已建设较为完备的污水处理厂,占全国城市的98.5%,但是根据最近的统计数据,全国各城市的平均污水处理率仅82.13%,某些城市的污水处理率连70%都无法达到。不难看出,这距离理想指标差距甚远。而运行负荷不足,使得近一半的污水处理厂出水水质超标或运行异常。可以看出,全国各大城市的污水处理厂的运行现状不容乐观。 污水处理过程是一个工艺复杂,具有强耦合、不确定、非线性和大滞后等特点的复杂系统。经过多年的建设,我国污水处理行业取得了一定的成绩,但落后的生产技术和粗放的管理使得大部分污水厂处理成本高、效率低。最突出的表现在相对较小的污水处理厂,因为仪表的准确性不好,设备运行调整迟缓导致出水水质会有些差异,可靠性和抗干扰能力不是很高。因此,如何保证污水处理厂出水水质合格,并在此前提下尽可能的降低能耗物耗并改善生产管理方式是现阶段需要迫切解决的问题。 发明内容 本发明的目的是针对现有技术中所存在的不足,发明一种污水处理过程溶解氧和硝态氮基于果蝇优化和最小二乘支持向量机(LSSVM)模型控制方法和系统,通过采集污水过程数据,建立包含污水过程溶解氧和硝态氮系统模型,准确描述系统实时状态,采用果蝇算法进行滚动优化,将控制目标及各种约束体现在优化性能指标中,并根据实时数据在线更新模型。实现了污水处理过程的流程优化控制,能根据控制情况及时调整控制量,保证控制过程的稳定,而且能够根据过程的变化情况进行优化控制,使污水处理过程能耗降低。 设系统第k步柔化给定yr(k+j)和模型预测输出ym(k+j/k)的偏差为: e(k+j)=yr(k+j)-ym(k+j/k) (1) j=1,2,...,M为预测步长,优化控制器的任务是使用优化算法获得如式(2)所示的目标函数的最小值: 并且需要满足系统的控制约束和输出约束: 式(2)中,中下标min,max分别表示最小和最大值;Mp为最大预测长度;Nu为控制长度;λ为控制加权系数,当不满足约束时,γ=1,目标函数加上一个大的惩罚值C,满足约束时γ=0;yr(k+j)为经过柔化的参考给定: 式(4)中,Tr为参考轨迹时间常数;TS为采样时间;yd为设定值向量,yd,NO为硝态氮SNO,2的给定,yd,O为溶解氧SO,5的给定,α为滤波常数矩,k=1,2,…,np。 对应式(2)最小值的未来控制量为: u(k+j)=(u1(k+j),u2(k+j),…,ul(k+j))T (5) 式(5)中,j=1,2,...,Nu,l为控制量的维数。 优化控制方法包括以下步骤: 步骤一、采集污水过程实时数据,通过标准的LSSVM学习算法离线获得包含污水过程溶解氧和硝态氮系统模型,并在过程控制器中编程实现 步骤二、采集过程实时数据,根据上一时刻的硝态氮浓度SNO,2(k-1)、上一时刻的溶解氧浓度SO,5(k-1)和给定yd计算k时刻的参考值yr(k),计算公式如式(4)所示,将实时采集过程数据送给模型输入。 步骤三、调用果蝇优化控制算法,代入步骤二中的参数,不断调用基于LSSVM的预测模型,计算目标函数适应值,得出目标函数最优控制量。 步骤四、果蝇优化控制器输出最优解。令k=k+1,进入下一采样时刻。如果更新间隔时间到,将最新采集的数据加入到训练集中,将相同时间长度的最老数据从训练集删除,根据模型误差情况通过新采集的滚动窗口数据通过LSSVM训练算法更新模型。 果蝇优化控制算法在每一采样时刻的具体工作步骤如下: Step1:初始化。确定种群数量sizepop,最大迭代次数maxgen等算法参数,并对果蝇种群的初始位置(X1axis,Y1axis),(X2axis,Y2axis)在可行区间初始化。 Step2:嗅觉随机搜索。令初始代数g=0;设定迭代过程中果蝇个体在嗅觉觅食阶段的随机飞行方向的区间和搜索步长的区间,搜索步长RandomValue在搜索步长区间内随机产生,则有: Step3:初步计算。在无法得知食物的具体坐标的情况下,只能通过计算个体与坐标原点的距离来求味道浓度的判定Si。具体公式如下: 其中如果其中a1,a2为范围系数。 Step4:计算个体的气味浓度值。令Qa(k)=S1i,kLa(k)=S2i将k时刻状态量(SNO,2(k),SO,5(k))、五号池的爆气量(氧转移系数kLa,5(k))和回流量Qa(k)代入预测模型(11)和味道浓度判断函数(2),计算每个果蝇个体的气味浓度值: smelli=fitness(Qa(k),kLa,5(k)) (8) Step5:根据气味浓度值,找出当前种群中气味浓度值最小的个体: [bestSmell,bestindex]=min(smell) (9) Step6:视觉定位。记录并保留最佳味道浓度值bestSmell和此时的最优果蝇个体的坐标,同时所有个体依赖视觉飞往最优个体的位置: Smellbest=bestSmell X1axis=X1(bestindex) Y1axis=Y1(bestindex) (10) X2axis=X2(bestindex) Y2axis=Y2(bestindex) Step7:迭代寻优。首先判断是否达到终止条件g=maxgen。当g 采用支持向量机建立污水处理过程模型,采用两个控制量内回流流量(Qa),x1,曝气流量(kLa,5)x2以及进水化学需氧量(COD)x3、进水生化需氧量(BOD5)x4、进水悬浮固体浓度(SS)x5、进水总磷(TP)x6、进水氨氮(NH3-N)x7、进水总氮(TP)x8、进水水温x9、进水pH值x10、进水水量x11、悬浮物MLSSx12、氧化还原电位(ORP)x13作为输入变量,以上x3-x13过程变量如不能实时采集,则不纳入输入变量。对原始数据进行预处理,利用主元分析方法对样本属性进行降维,重构出新的训练样本集;构造输入变量Xk=[x1,k,x1,k-1,x2,k,x2,k-1,…,x13,k,x13,k-1],其中xi,k表示xi变量k时刻值,xi,k-1为前一时刻值。出水硝态氮浓度SNO,2和溶解氧SO,5以及出水COD、BOD5、SS、TN作为模型输出。 根据历史和实验数据,取时间窗口宽度k=1,2,…,N构成训练数据,通过支持向量学习得到输入输出模型,一步预测输出: 式中K(xi,x)核函数取径向基函数;b为偏置;θi=αi-αi*,αi和αi*为拉格朗日乘子,xi为支持向量,La为支持向量个数。多步预测输出可由一步预测输出往后递推得到。 在线运行到达更新周期后,将新采集的时间序列数据XN+j,j=1,2,…,p,p为更新时间周期数时,加入训练数据,舍弃老数据Xj,当时间窗口宽度误差和η为一预先确定的正数,启动更新后窗口数据对支持向量机训练,从而完成模型的在线更新和校正。 有益效果:本发明实现了污水处理过程的流程优化控制,能根据过程变化情况及时调整控制量,保证控制过程的稳定,而且能够根据过程的变化情况在线更新模型,进行优化控制,使污水处理过程能耗降低。





