
申请日2017.11.09
公开(公告)日2018.02.16
IPC分类号G01N33/18
摘要
一种污水池巡检机器人及其检测方法,它涉及污水处理厂水质监测领域。本发明解决了现有的水厂巡检工作主要由工作人员来完成,存在劳动强度大,运营成本高,且工作现场有害气体易对工作人员身体造成伤害的问题。本发明的机器人驱动机构、动力机控制舱和传感器收放组件均安装在U型机架上,动力机控制舱通过导线控制连接机器人驱动机构,动力机控制舱与机器人驱动机构的连接对机器人驱动机构的驱动进行控制,动力机控制舱通过导线控制连接传感器收放组件,动力机控制舱与传感器收放组件的连接对传感器收放组件的收放动作进行控制对水质进行检测。本发明用于监测水厂设备运行情况及水样检测。
摘要附图
权利要求书
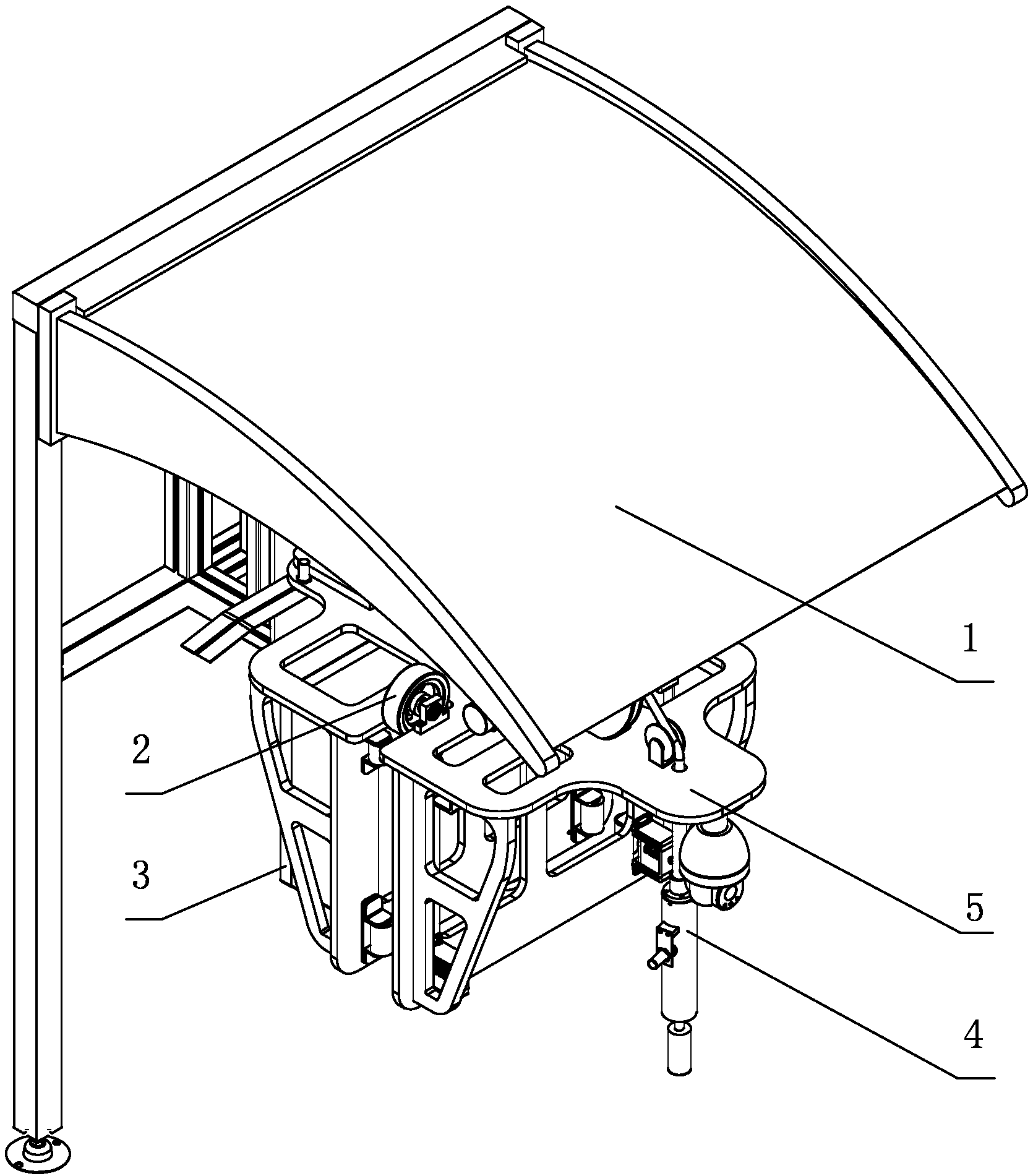
1.一种污水池巡检机器人,它包括机器人本体和用于机器人本体充电的充电桩(1),其特征在于:机器人本体包括机器人驱动机构(2)、动力机控制舱(3)、传感器收放组件(4)和U型机架(5),机器人驱动机构(2)、动力机控制舱(3)和传感器收放组件(4)均安装在U型机架(5)上,动力机控制舱(3)通过导线控制连接机器人驱动机构(2),动力机控制舱(3)与机器人驱动机构(2)的连接对机器人驱动机构(2)的驱动进行控制,动力机控制舱(3)通过导线控制连接传感器收放组件(4),动力机控制舱(3)与传感器收放组件(4)的连接对传感器收放组件(4)的收放动作进行控制对水质进行检测。
2.根据权利要求1所述的一种污水池巡检机器人,其特征在于:所述充电桩(1)包括充电桩框架(1-1)、雨棚(1-2)、控制箱(1-3)、安装板(1-5)、两个电极(1-4)和两个电极托板(1-6),充电桩框架(1-1)的一侧安装弧形雨棚(1-2),控制箱(1-3)和两个电极托板(1-6)通过安装板(1-5)与充电桩框架(1-1)固接,两个电极(1-4)分别安装在电极托板(1-6)上。
3.根据权利要求1或2所述的一种污水池巡检机器人,其特征在于:所述充电桩(1)的数量为n个,n=1,2,3,4,5,6……。
4.根据权利要求1所述的一种污水池巡检机器人,其特征在于:机器人驱动机构(2)包括驱动轮组件、从动轮组件、数数传感器(2-2)、两个电极检测传感器(2-3)、两个电极触头、和四组辅助轮组件,U型机架(5)的一端安装驱动轮组件,U型机架(5)的另一端安装从动轮组件,四组辅助轮组件对称设置在U型机架(5)的两端,U型机架(5)的一侧安装两个电极触头和两个电极检测传感器(2-3),数数传感器(2-2)安装在两组辅助轮组件之间的U型机架(5)上。
5.根据权利要求4所述的一种污水池巡检机器人,其特征在于:驱动轮组件包括驱动电机支架(2-7)、机器人驱动电机(2-8)、联轴器(2-9)、驱动轮(2-10)、驱动轴(2-11)和第二轴承座(2-12),U型机架(5)的一端加工第一轮槽,机器人驱动电机(2-8)通过驱动电机支架(2-7)安装在U型机架(5)上,驱动轮(2-10)套装在驱动轴(2-11)上,驱动轴(2-11)的一端通过联轴器(2-9)与机器人驱动电机(2-8)的输出轴连接,驱动轴(2-11)的另一端通过第二轴承座(2-12)转动安装在U型机架(5)上,驱动轮(2-10)置于第一轮槽内,机器人驱动电机(2-8)与驱动轮(2-10)的连接对于驱动轮(2-10)的转动进行驱动。
6.根据权利要求4或5所述的一种污水池巡检机器人,其特征在于:从动轮组件包括从动轴(2-4)、从动轮(2-5)和两个第一轴承座(2-6),U型机架(5)的另一端加工第二轮槽,两个第一轴承座(2-6)分别安装在第二轮槽两侧的U型机架(5)上,从动轮(2-5)套装在从动轴(2-4)上,从动轴(2-4)的两端分别与两个第一轴承座(2-6)转动连接。
7.根据权利要求6所述的一种污水池巡检机器人,其特征在于:每组辅助轮组件包括固定辅助装置和位移辅助装置,固定辅助装置和位移辅助装置对称设置在U型机架(5)的两侧,固定辅助装置包括辅助轮支架(2-13)和第一辅助轮(2-14),辅助轮支架(2-13)安装在U型机架(5)的一侧,辅助轮支架(2-13)上转动安装第一辅助轮(2-14),位移辅助装置包括辅助轮滑道(2-15)、辅助轮滑块(2-16)、弹簧(2-17)、连接销轴(2-18)和第二辅助轮(2-19),第二辅助轮(2-19)转动安装在辅助轮滑块(2-16)上,第二辅助轮(2-19)的纵向轴线与第一辅助轮(2-14)的纵向轴线平行设置,辅助轮滑块(2-16)滑动安装在辅助轮滑道(2-15)上,辅助轮滑道(2-15)安装在U型机架(5)的另一侧,连接销轴(2-18)的一端与辅助轮滑道(2-15)固接,连接销轴(2-18)的另一端与辅助轮滑块(2-16)滑动连接,连接销轴(2-18)上设有弹簧(2-17)。
8.根据权利要求1所述的一种污水池巡检机器人,其特征在于:所述传感器收放组件(4)包括传感器仓(4-1)、溶解氧传感器(4-2)、位置传感器(4-3)、转盘驱动电机(4-4)、转盘(4-5)、第三轴承座(4-6)、转盘轴(4-7)、电滑环(4-8)、电滑环支架(4-9)、底座(4-10)、电机座(4-11)、导向轮(4-12)、导向轮支架(4-13)、导向杆(4-14)和法兰(4-15),转盘驱动电机(4-4)通过电机座(4-11)固定安装在U型机架(5)一侧的上端面,底座(4-10)与U型机架(5)的上端面固接,第三轴承座(4-6)安装在底座(4-10)的上端,转盘(4-5)的圆周上开设第一凹槽,转盘(4-5)套装在转盘轴(4-7)上,转盘轴(4-7)的一端与转盘驱动电机(4-4)连接,驱动电机(4-4)与转盘轴(4-7)的连接实现对转盘(4-5)的转动进行驱动,转盘轴(4-7)的另一端与第三轴承座(4-6)连接,转盘(4-5)远离转盘驱动电机(4-4)的一侧设置电滑环(4-8),电滑环(4-8)通过电滑环支架(4-9)与U型机架(5)固接,导向轮(4-12)通过导向轮支架(4-13)安装在转盘(4-5)远离两个电极检测传感器(2-3)一侧的U型机架(5)上,导向轮(4-12)的圆周上加工第二凹槽,转盘(4-5)与导向轮(4-12)共面设置,U型机架(5)的另一侧开设传感器通孔,导向杆(4-14)为空心筒状结构,导向杆(4-14)的一端与U型机架(5)固接并与U型机架(5)另一侧的传感器通孔连通,导向杆(4-14)的另一端通过法兰(4-15)与传感器仓(4-1)连接,传感器仓(4-1)的侧壁安装位置传感器(4-3),溶解氧传感器(4-2)的连接端由下至上依次穿过传感器仓(4-1)、导向杆(4-14)及U型机架(5)另一侧的传感器通孔并绕过导向轮(4-12)圆周上的第二凹槽和转盘(4-5)圆周上的第一凹槽与电滑环(4-8)固接。
9.根据权利要求1、2、4、5、7或8所述的一种污水池巡检机器人,其特征在于:机器人本体还包括摄像头(4-16),摄像头(4-16)安装在靠近传感器收放组件(4)一侧的U型机架(5)上。
10.一种权利要求9所述的污水池巡检机器人的检测方法,其特征在于:将机器人本体放置在栏杆上,利用动力机控制舱(3)对机器人本体的行走进行控制,利用动力机控制舱(3)对机器人本体的检测进行控制,利用充电桩(1)为机器人本体提供动力来源,污水池巡检机器人对水样进行检测的过程:
机器人驱动电机(2-8)在接收到动力机控制舱(3)发出的信号后带动驱动轮(2-10)旋转,使得机器人本体在栏杆上实现行走,动力机控制舱(3)通过控制机器人驱动电机(2-8)的正反转实现机器人本体的运动方向,机器人本体通过驱动轮(2-10)、从动轴(2-4)、四个第一辅助轮(2-14)和四个第二辅助轮(2-19)在栏杆上保持平衡;
机器人本体通过对称设置在U型机架(5)的两侧的四组辅助轮组件实现转弯功能,当机器人本体运动到栏杆转弯处时,栏杆转弯半径内侧的径向力促使机器人本体进行转弯;
在机器人本体行走的过程中,当栏杆直径突然变粗时,转动安装在辅助轮滑块(2-16)上的第二辅助轮(2-19)在栏杆径向力的作用下推动辅助轮滑块(2-16)沿着辅助轮滑道(2-15)向后压缩安装在连接销轴(2-18)上的弹簧(2-17),既保证了机器人本体顺利通过栏杆,又使得第二辅助轮(2-19)和第一辅助轮(2-14)共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走,当栏杆直径突然变细时,被压缩的缩弹簧(2-17)自动回位推动第二辅助轮(2-19)向前运动和第一辅助轮(2-14)共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走;
所述充电桩(1)的充电桩框架(1-1)一侧安装的弧形雨棚(1-2)具有良好的防水作用,通过安装板(1-5)固定在充电桩框架(1-1)上的两个电极托板(1-6)用于安装两个电极(1-4),机器人本体通过动力机控制舱(3)实时监测自身电压,当机器人本体的自身电压低于预设值时,动力机控制舱(3)控制机器人驱动电机(2-8)带动驱动轮(2-10)旋转,使得机器人本体自动运行到充电桩(1)附近,安装在U型机架(5)一侧的两个电极检测传感器(2-3)用于检测安装在充电桩(1)上的两个电极(1-4),当两个电极检测传感器(2-3)检测到两个电极(1-4)时,动力机控制舱(3)控制机器人驱动电机(2-8)停止转动,此时安装在U型机架(5)一侧的两个电极触头与充电桩(1)的两个电极(1-4)接触进行充电,充电完成后,动力机控制舱(3)控制机器人驱动电机(2-8)带动驱动轮(2-10)旋转,实现机器人本体的运行工作;
安装在U型机架(5)上的数数传感器(2-2)用于检测机器人本体经过栏杆数,并将信号传回至动力机控制舱(3)控制机器人本体停止运动,动力机控制舱(3)控制转盘驱动电机(4-4)带动转盘(4-5)旋转将溶解氧传感器(4-2)放入水中进行检测,当检测工作结束后回传信号至动力机控制舱(3),使得动力机控制舱(3)控制转盘驱动电机(4-4)反向运动,转盘驱动电机(4-4)带动转盘(4-5)旋转将溶解氧传感器(4-2)收回,通过传感器仓(4-1)侧壁安装的位置传感器(4-3)获得溶解氧传感器(4-2)的位置并传回信号至动力机控制舱(3),动力机控制舱(3)控制转盘驱动电机(4-4)停止转动,动力机控制舱(3)控制机器人驱动电机(2-8)带动驱动轮(2-10)旋转,实现机器人本体继续向前运动进行下一步工作,同时摄像头(4-16)将检测的的现场环境画面实时传送至监控室,让工作人员可以实时监控工作现场,溶解氧传感器(4-2)检测到的数据实时传送至后端进行分析处理,至此完成污水池巡检机器人对水质的检测。
说明书
一种污水池巡检机器人及其检测方法
技术领域
本发明涉及污水处理厂水质监测领域,具体涉及一种污水池巡检机器人及其检测方法。
背景技术
污水处理是城市基础建设中必不可少的工作之一。为了保证污水处理厂的正常工作,需要定期对污水处理厂进行现场巡逻,并对污水处理厂水质进行监测。监测水厂设备运行情况,采集水厂设备的工作状态,即时发现水厂设备的外观异常,以及对水样进行检测,即时发现水厂水质的内部热缺陷等故障。由于传统的水厂巡检工作主要由工作人员来完成,工作人员劳动强度大,增加了水厂的运营成本,并且工作现场有害气体容易对工作人员身体造成伤害。
综上所述,现有的水厂巡检工作主要由工作人员来完成,存在劳动强度大,运营成本高,且工作现场有害气体易对工作人员身体造成伤害的问题。
发明内容
本发明的目的是为了解决现有的水厂巡检工作主要由工作人员来完成,存在劳动强度大,运营成本高,且工作现场有害气体易对工作人员身体造成伤害的问题,进而提供一种污水池巡检机器人及其检测方法。
本发明的技术方案是:
一种污水池巡检机器人,它包括机器人本体和用于机器人本体充电的充电桩,机器人本体包括机器人驱动机构、动力机控制舱、传感器收放组件和U型机架,机器人驱动机构、动力机控制舱和传感器收放组件均安装在U型机架上,动力机控制舱通过导线控制连接机器人驱动机构,动力机控制舱与机器人驱动机构的连接对机器人驱动机构的驱动进行控制,动力机控制舱通过导线控制连接传感器收放组件,动力机控制舱与传感器收放组件的连接对传感器收放组件的收放动作进行控制对水质进行检测;
进一步地,所述充电桩包括充电桩框架、雨棚、控制箱、安装板、两个电极和两个电极托板,充电桩框架的一侧安装弧形雨棚,控制箱和两个电极托板通过安装板与充电桩框架固接,两个电极分别安装在电极托板上;
进一步地,所述充电桩的数量为n个,n=1,2,3,4,5,6……;
进一步地,机器人驱动机构包括驱动轮组件、从动轮组件、数数传感器、两个电极检测传感器、两个电极触头、和四组辅助轮组件,U型机架的一端安装驱动轮组件,U型机架的另一端安装从动轮组件,四组辅助轮组件对称设置在U型机架的两端,U型机架的一侧安装两个电极触头和两个电极检测传感器,数数传感器安装在两组辅助轮组件之间的U型机架上;
进一步地,驱动轮组件包括驱动电机支架、机器人驱动电机、联轴器、驱动轮、驱动轴和第二轴承座,U型机架的一端加工第一轮槽,机器人驱动电机通过驱动电机支架安装在U型机架上,驱动轮套装在驱动轴上,驱动轴的一端通过联轴器与机器人驱动电机的输出轴连接,驱动轴的另一端通过第二轴承座转动安装在U型机架上,驱动轮置于第一轮槽内,机器人驱动电机与驱动轮的连接对于驱动轮的转动进行驱动;
进一步地,从动轮组件包括从动轴、从动轮和两个第一轴承座,U型机架的另一端加工第二轮槽,两个第一轴承座分别安装在第二轮槽两侧的U型机架上,从动轮套装在从动轴上,从动轴的两端分别与两个第一轴承座转动连接;
进一步地,每组辅助轮组件包括固定辅助装置和位移辅助装置,固定辅助装置和位移辅助装置对称设置在U型机架的两侧,固定辅助装置包括辅助轮支架和第一辅助轮,辅助轮支架安装在U型机架的一侧,辅助轮支架上转动安装第一辅助轮,位移辅助装置包括辅助轮滑道、辅助轮滑块、弹簧、连接销轴和第二辅助轮,第二辅助轮转动安装在辅助轮滑块上,第二辅助轮的纵向轴线与第一辅助轮的纵向轴线平行设置,辅助轮滑块滑动安装在辅助轮滑道上,辅助轮滑道安装在U型机架的另一侧,连接销轴的一端与辅助轮滑道固接,连接销轴的另一端与辅助轮滑块滑动连接,连接销轴上设有弹簧;
进一步地,所述传感器收放组件包括传感器仓、溶解氧传感器、位置传感器、转盘驱动电机、转盘、第三轴承座、转盘轴、电滑环、电滑环支架、底座、电机座、导向轮、导向轮支架、导向杆和法兰,转盘驱动电机通过电机座固定安装在U型机架一侧的上端面,底座与U型机架的上端面固接,第三轴承座安装在底座的上端,转盘的圆周上开设第一凹槽,转盘套装在转盘轴上,转盘轴的一端与转盘驱动电机连接,驱动电机与转盘轴的连接实现对转盘的转动进行驱动,转盘轴的另一端与第三轴承座连接,转盘远离转盘驱动电机的一侧设置电滑环,电滑环通过电滑环支架与U型机架固接,导向轮通过导向轮支架安装在转盘远离两个电极检测传感器一侧的U型机架上,导向轮的圆周上加工第二凹槽,转盘与导向轮共面设置,U型机架的另一侧开设传感器通孔,导向杆为空心筒状结构,导向杆的一端与U型机架固接并与U型机架另一侧的传感器通孔连通,导向杆的另一端通过法兰与传感器仓连接,传感器仓的侧壁安装位置传感器,溶解氧传感器的连接端由下至上依次穿过传感器仓、导向杆及U型机架另一侧的传感器通孔并绕过导向轮圆周上的第二凹槽和转盘圆周上的第一凹槽与电滑环固接。
进一步地,机器人本体还包括摄像头,摄像头安装在靠近传感器收放组件一侧的U型机架上。
一种污水池巡检机器人的检测方法,将机器人本体放置在栏杆上,利用动力机控制舱对机器人本体的行走进行控制,利用动力机控制舱对机器人本体的检测进行控制,利用充电桩为机器人本体提供动力来源,污水池巡检机器人对水样进行检测的过程:
机器人驱动电机在接收到动力机控制舱发出的信号后带动驱动轮旋转,使得机器人本体在栏杆上实现行走,动力机控制舱通过控制机器人驱动电机的正反转实现机器人本体的运动方向,机器人本体通过驱动轮、从动轴、四个第一辅助轮和四个第二辅助轮在栏杆上保持平衡;
机器人本体通过对称设置在U型机架的两侧的四组辅助轮组件实现转弯功能,当机器人本体运动到栏杆转弯处时,栏杆转弯半径内侧的径向力促使机器人本体进行转弯;
在机器人本体行走的过程中,当栏杆直径突然变粗时,转动安装在辅助轮滑块上的第二辅助轮在栏杆径向力的作用下推动辅助轮滑块沿着辅助轮滑道向后压缩安装在连接销轴上的弹簧,既保证了机器人本体顺利通过栏杆,又使得第二辅助轮和第一辅助轮共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走,当栏杆直径突然变细时,被压缩的缩弹簧自动回位推动第二辅助轮向前运动和第一辅助轮共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走;
所述充电桩的充电桩框架一侧安装的弧形雨棚具有良好的防水作用,通过安装板固定在充电桩框架上的两个电极托板用于安装两个电极,机器人本体通过动力机控制舱实时监测自身电压,当机器人本体的自身电压低于预设值时,动力机控制舱控制机器人驱动电机带动驱动轮旋转,使得机器人本体自动运行到充电桩附近,安装在U型机架一侧的两个电极检测传感器用于检测安装在充电桩上的两个电极,当两个电极检测传感器检测到两个电极时,动力机控制舱控制机器人驱动电机停止转动,此时安装在U型机架一侧的两个电极触头与充电桩的两个电极接触进行充电,充电完成后,动力机控制舱控制机器人驱动电机带动驱动轮旋转,实现机器人本体的运行工作;
安装在U型机架上的数数传感器用于检测机器人本体经过栏杆数,并将信号传回至动力机控制舱控制机器人本体停止运动,动力机控制舱控制转盘驱动电机带动转盘旋转将溶解氧传感器放入水中进行检测,当检测工作结束后回传信号至动力机控制舱,使得动力机控制舱控制转盘驱动电机反向运动,转盘驱动电机带动转盘旋转将溶解氧传感器收回,通过传感器仓侧壁安装的位置传感器获得溶解氧传感器的位置并传回信号至动力机控制舱,动力机控制舱控制转盘驱动电机停止转动,动力机控制舱控制机器人驱动电机带动驱动轮旋转,实现机器人本体继续向前运动进行下一步工作,同时摄像头将检测的的现场环境画面实时传送至监控室,让工作人员可以实时监控工作现场,溶解氧传感器检测到的数据实时传送至后端进行分析处理,至此完成污水池巡检机器人对水质的检测。
本发明与现有技术相比具有以下效果:
1、本发明能够随时监测水厂设备的运行情况,并将检测结果通过互联网回传到监控平台。监测环境的摄像头将检测到的现场环境画面实时传送到监控室,使得工作人员能够实时监控工作现场。有效地降低了工作人员的劳动强度和水厂的运营成本,使得水厂与传统的人工监测相比较运营成本减少了一半以上。
2、本发明能够随时通过水样检测系统对水厂水样进行检测,转盘驱动电机工作带动转盘将溶解氧传感器放入水中进行检测,溶解氧传感器将检测到的数据实时传送到后端进行分析处理。本发明能够对水厂水质进行实时监测和管理,有效地避免了工作现场的有害气体对工作人员的身体健康造成伤害。
3、本发明的机器人本体能够在栏杆上实现转弯,当机器人本体运动到栏杆转弯处时,机器人本体继续向前运动,此时栏杆转弯半径内侧会给机器人本体径向力,使机器人本体进行转弯运动。
4、本发明具有较好的适应性。在机器人本体行走的过程中,当栏杆直径突然变粗时,转动安装在辅助轮滑块上的第二辅助轮在栏杆径向力的作用下推动辅助轮滑块沿着辅助轮滑道向后压缩安装在连接销轴上的弹簧,既保证了机器人本体顺利通过栏杆,又使得第二辅助轮和第一辅助轮共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走,当栏杆直径突然变细时,被压缩的缩弹簧自动回位推动第二辅助轮向前运动和第一辅助轮共同作用与栏杆紧密贴合,使得机器人本体在栏杆上保持平稳行走。
5、本发明的机器人本体能够实现自动充电,具有对自身电压实时监测的功能。当本发明的机器人本体监测到自身电压低于预设值时,在栏杆上自动运行到附近的充电桩1进行充电,充满电后能够自动工作。
6、本发明能够实现自动检测和手动检测两种工作模式。操作简单,检测准确,具有较好的智能性和推广性。
7、为了更好的实现水厂安全、可靠地巡检,水厂建设巡检机器人应用系统,通过无线网络对巡检机器人实现遥控巡检。巡检机器人应用系统通过定位系统对巡检机器人准确导航和定位,采集水厂设备的工作状态,即时向控制中心返回设备状态和巡检机器人本体工作状态。控制中心通过无线网络对巡检机器人实施监控,并对返回的数据进行处理,即时发现水厂设备的外观异常和内部热缺陷等故障,从而达到可靠的巡检。通过开发、安装水厂巡检机器人系统,可达到巡检机器人随时监测水厂设备运行情况以及对水样进行检测,并将检测结果通过互联网回传到监控平台。





