
申请日 2016.12.29
公开(公告)日 2017.05.24
IPC分类号 C02F3/00; G06N3/00; G06N3/04
摘要
针对污水处理过程出水水质不达标且能耗较高等特点,本发明提出了一种污水处理过程多目标实时优化控制方法,实现对污水处理过程中溶解氧SO和硝态氮SNO浓度的优化控制;该优化控制方法将建立的基于径向基核函数的能耗和出水水质模型作为优化目标函数,通过多目标粒子群算法优化目标函数获得溶解氧SO和硝态氮SNO的优化设定值,利用模糊神经网络对溶解氧SO和硝态氮SNO的优化设定值进行跟踪控制;解决了污水处理过程多目标实时优化控制的问题,在保证出水水质的基础上降低能耗,促进污水处理厂高效稳定运行。
说明书
一种污水处理过程多目标实时优化控制方法
技术领域
本发明利用基于多目标粒子群算法和模糊神经网络的方法实现污水处理过程中溶解氧SO和硝态氮SNO浓度的实时优化控制,溶解氧SO和硝态氮SNO的浓度不仅决定出水水质,而且对能耗有着重要影响。将基于多目标粒子群算法和模糊神经网络的优化控制方法应用于时变的污水处理系统,对溶解氧SO和硝态氮SNO的浓度进行实时优化控制,既可以节约运行成本,又能促使污水处理厂达标排放,保证高效稳定运行,是先进制造技术领域的重要分支,既属于控制领域,又属于水处理领域。
背景技术
污水处理过程是通过生物化学反应对污染物进行吸附、分解、氧化等,使污染物得到降解并从污水中分离出来,从而实现污水的净化。城市污水处理厂的高效稳定运行对于提高出水水质、降低操作成本、促进水资源循环利用发挥了重要作用,是缓解水资源匮乏的重要举措;不但具有较好的经济效益,而且具有显著的环境和社会效益。因此,本发明的研究成果具有广阔的应用前景。
污水处理是一个包含众多物理及微生物生化反应现象的复杂工业系统,具有明显的非线性、时变、不确定干扰严重等特点,而且,污水处理过程精确的数学模型较难建立,使得污水处理过程控制及优化存在诸多难点问题。污水处理过程本质为多目标优化控制问题,然而,污水处理过程优化模型未建立,系统能耗、出水水质与优化变量间的关系无法通过清晰的机理数学表达式描述,且污水处理过程中能耗和出水水质是一对相互影响的性能指标,如何平衡能耗和出水水质之间的关系对保证污水过程高效稳定运行具有重要的意义。溶解氧SO和硝态氮SNO的浓度对污水处理过程具有重要作用,不仅决定出水水质,而且对能耗有较大影响。随着污水处理过程的动态变化,实时调整溶解氧SO和硝态氮SNO的浓度,对保证出水水质排放达标的基础上同时降低能耗是至关重要的。因此,必须寻求新的优化控制方法,不仅可以建立能耗、出水水质和优化变量间的模型,而且可以根据工况提供动态的优化设定值,实现高精度在线控制,以满足动态污水处理过程的需要。合理的优化控制方法可以保证出水水质,节省污水处理运行费用,同时也是减少和应对异常工况发生、保障污水处理过程正常运行的关键。此外,通过提高污水处理过程自动化水平,还可以有效减少运行管理和操作人员,降低运行费用。
本发明设计了一种污水处理过程多目标实时优化控制方法,主要通过多目标粒子群算法获得时变的溶解氧SO和硝态氮SNO浓度的优化设定值,利用模糊神经网络实现对溶解氧SO和硝态氮SNO浓度的在线控制。
发明内容
本发明获得了一种污水处理过程多目标实时优化控制方法,该优化控制方法通过多目标粒子群算法获得溶解氧SO和硝态氮SNO浓度的优化设定值问题;利用模糊神经网络实现对溶解氧SO和硝态氮SNO浓度在线控制;解决了污水处理过程中多目标实时优化控制的问题,提高了污水处理的性能,保障污水处理过程高效稳定运行;
本发明采用了如下的技术方案及实现步骤:
1.一种污水处理过程多目标实时优化控制方法,其特征在于,包括以下步骤:
(1)选择与能耗和出水水质都相关的变量为:好氧末段溶解氧SO、厌氧末段硝态氮SNO、出水混合固体悬浮物MLSS、出水氨氮SNH;
(2)建立基于径向基核函数的能耗和出水水质模型:
其中,f1(t)和f2(t)分别为t时刻能耗和出水水质模型,w10(t)是目标函数f1(t)的输出偏移,w20(t)是目标函数f2(t)的输出偏移,w10(t),w20(t)的取值区间为[-2,2],w1n(t)是目标函数f1(t)中径向基核函数的权值,w2n(t)是目标函数f2(t)中径向基核函数的权值,w1n(t)和w2n(t)的取值区间为[-3,3],υ(t)是目标函数f1(t)和f2(t)的共同输入变量,υ(t)=[SO(t),SNO(t),MLSS(t),SNH(t)],c1n(t)是目标函数f1(t)中径向基核函数的中心,c2n(t)是目标函数f2(t)中径向基核函数的中心,c1n(t)和c2n(t)中每个变量的取值区间为[-1,1],b1n(t)是目标函数f1(t)中径向基核函数的宽度,b2n(t)是目标函数f2(t)中径向基核函数的宽度,b1n(t)和b2n(t)的取值区间为[0,2],N是核函数的个数;
(3)设计基于多目标粒子群算法的实时优化方法:
①初始化优化迭代步数K;
②将建立的能耗和出水水质模型作为多目标粒子群算法的优化目标函数;
③第k步迭代计算时,把粒子的位置x(k)=[SO(k),SNO(k),MLSS(k),SNH(k)]作为目标函数的输入,计算目标函数值,获得进化计算过程中的个体最优位置p(k),将第k步的个体最优位置p(k)与k-1步知识库的解A(k-1)进行比较,A(k-1)=[a1(k-1),a2(k-1),…,aι(k-1)],aι(k-1)为第k-1步知识库中第ι个最优解,通过支配关系更新第k步的知识库A(k),支配关系计算功能是:
A(k)=A(k-1)∪p(k-1),if fh(aι(k-1))≥fh(p(k-1)),h=1,2; (2)
其中,∪是关系并,如果p(k-1)的目标函数值小于aι(k-1)的目标函数值,则知识库中保存个体最优解p(k-1),否则保存解aι(k-1),fh()是优化目标函数,f1()是基于能耗模型的优化目标函数,f2()是基于出水水质模型的优化目标函数,根据密度法从知识库A(k)中选择全局最优解g(k);
④通过第k步的个体最优解p(k)和全局最优解g(k)更新k+1步的粒子位置和速度,粒子速度和位置更新公式为:
vi,d(k+1)=ω・vi,d(k)+c1r1(pi,d(k)-xi,d(k))+c2r2(gd(k)-xi,d(k)); (3)
xid(k+1)=xid(k)+vid(k+1); (4)
其中,vi,d(k)和xi,d(k)是第k步迭代时第i个粒子在d维搜索空间上的速度和位置,i的取值范围是[1,100],d=5,是惯性权重,的取值范围是(0,1),c1和c2分别是个体最优位置加速因子和全局最优位置加速因子,c1和c2的取值范围是(0,1),r1和r2分别是个体最优位置系数和全局最优位置系数,r1和r2的取值范围是(0,1),pi,d(k)是第k步迭代时第i个粒子在d维搜索空间上的个体最优解,gd(k)是第k步迭代时在d维搜索空间上的全局最优解;
⑤如果当前的迭代步数k大于等于优化迭代步数K,转到步骤⑥;如果当前的迭代步数k小于最大迭代步数K,迭代步数k加1,转到步骤③;
⑥从知识库A(K)中随机选择一个全局最优解gj(K),gj(K)=[SO*(K),SNO*(K),MLSS*(K),SNH*(K)],SO*(K)为溶解氧优化设定值,SNO*(K)为硝态氮优化设定值,MLSS*(K)为混合固体悬浮物优化设定值,SNH*(K)为氨氮优化设定值,保存全局最优解gj(K);
(4)设计基于模糊神经网络的实时控制方法:
①设计模糊神经网络控制器,模糊神经网络分为四层:输入层、RBF层、归一化层、输出层;确定神经网络的结构为4-10-10-2的连接方式,即输入层神经元为4个,RBF层神经元为10个,归一化层神经元为10个,输出层神经元为2个,期望的训练精度为Ed,Ed∈[0,0.01],t时刻模糊神经网络RBF层、归一化层、输出层的计算功能分别是:
其中,ε(t)=[ε1(t),ε2(t),ε3(t),ε4(t)]是模糊神经网络的输入,ε1(t)是溶解氧SO实际输出与优化设定值SO*之间的误差,ε2(t)是溶解氧SO实际输出与优化设定值SO*之间的误差导数,ε3(t)是硝态氮SNO实际输出与优化设定值SNO*之间的误差,ε4(t)是硝态氮SNO实际输出与优化设定值SNO*之间的误差导数,μj(t)=[μ1j(t),μ2j(t),μ3j(t),μ4j(t)]是RBF层第j个神经元的中心,j=1,2,…,10,μj(t)中每个变量的取值范围是[-2,2],σj(t)=[σ1j(t),σ2j(t),σ3j(t),σ4j(t)]是RBF层第j个神经元的宽度,σj(t)中每个变量的取值范围是[0,2],j(t)是RBF层第j个神经元的输出,ψj(t)是归一化层第j个神经元的输出,ψ(t)是归一化层的输出,ψ(t)=[ψ1(t),ψ2(t),…,ψ10(t)],sq(t)=[s1q(t),s2q(t),…,s10q(t)]是输出层和归一化层的权值向量,sq(t)中每个变量的取值范围是[-4,4],是输出层第q个神经元的输出,q=1,2;
②利用梯度下降算法对模糊神经网络进行训练,若达到期望的训练精度Ed,则转到步骤③,否则继续训练;
③模糊神经网络的输出为操作变量氧传递系数的变化量和内循环回流量的变化量;
④将氧传递系数的变化量和内循环回流量的变化量传递给污水处理系统;
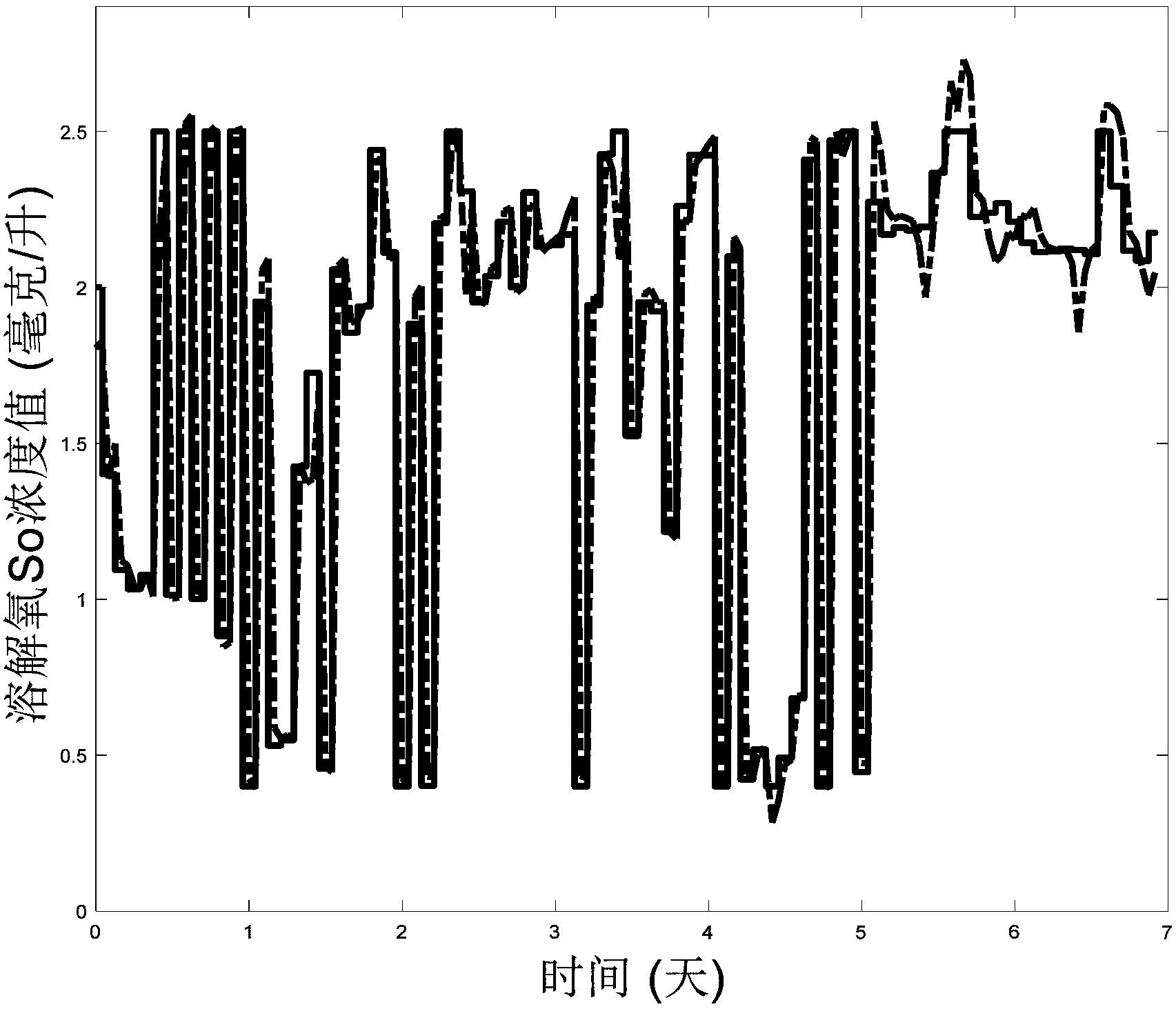
(5)基于多目标实时优化控制的污水处理系统的输出为实际溶解氧SO和硝态氮SNO的浓度值。
本发明的创造性主要体现在:
(1)本发明针对当前污水处理过程是一个复杂的、动态的生物化学反应过程,需要将溶解氧SO和硝态氮SNO浓度控制在一定范围内,保持污水处理过程正常运行,然而污水处理过程不仅具有非线性、大时变等特点,而且溶解氧SO和硝态氮SNO之间存在强耦合关系,难以实现溶解氧SO和硝态氮SNO之间的多目标优化控制;根据多目标优化控制的特点,采用了基于多目标粒子群优化算法和模糊神经网络相结合的优化控制,具有精度高,稳定性好等特点;
(2)本发明采用基于多目标粒子群算法和模糊神经网络的优化控制方法对污水处理过程溶解氧SO和硝态氮SNO的浓度进行实时优化控制,该优化控制方法可以根据动态污水处理过程提供时变的溶解氧SO和硝态氮SNO优化设定值,解决了污水处理过程出水水质不达标且能耗较高等问题;
特别要注意:本发明只是为了描述方便,采用多目标粒子群算法和模糊神经网络对溶解氧SO和硝态氮SNO的浓度进行优化控制,将其他的优化算法和控制算法相结合等相同原理的优化控制方法都应该属于本发明的范围。





