申请日2016.10.20
公开(公告)日2017.04.05
IPC分类号G01N33/18
摘要
本发明公开了一种养殖场废水处理效果实时监测方法,包括计算机、无线接收器、3个设于废水池中的椭圆形导轨;各个椭圆形导轨一端均与废水池壁连接,另一端均伸到废水池中部;每个椭圆形导轨上均设有水质检测装置,每个水质检测装置均包括壳体,设于壳体内的处理器,存储器,无线发射器和驱动电机,壳体下部设有可伸入水中的传感器组;每个水质检测装置均通过两个滚轮与椭圆形导轨接触,驱动电机与设于两个滚轮之间的转轴连接;无线接收器与计算机电连接。本发明具有检测灵敏度高,准确性好的特点。
摘要附图
权利要求书
1.一种养殖场废水处理效果实时监测方法,其特征是,包括计算机(1)、无线接收器(2)、3个设于废水池中的椭圆形导轨;各个椭圆形导轨一端均与废水池壁连接,另一端均伸到废水池中部;每个椭圆形导轨上均设有水质检测装置,每个水质检测装置均包括壳体,设于壳体内的处理器(3),存储器(4),无线发射器(5)和驱动电机(6),壳体下部设有可伸入水中的传感器组(7);每个水质检测装置均通过两个滚轮与椭圆形导轨接触,驱动电机与设于两个滚轮之间的转轴连接;每个水质检测装置的处理器分别与存储器、无线发射器、驱动电机和传感器组电连接;无线接收器与计算机电连接;
包括如下步骤:
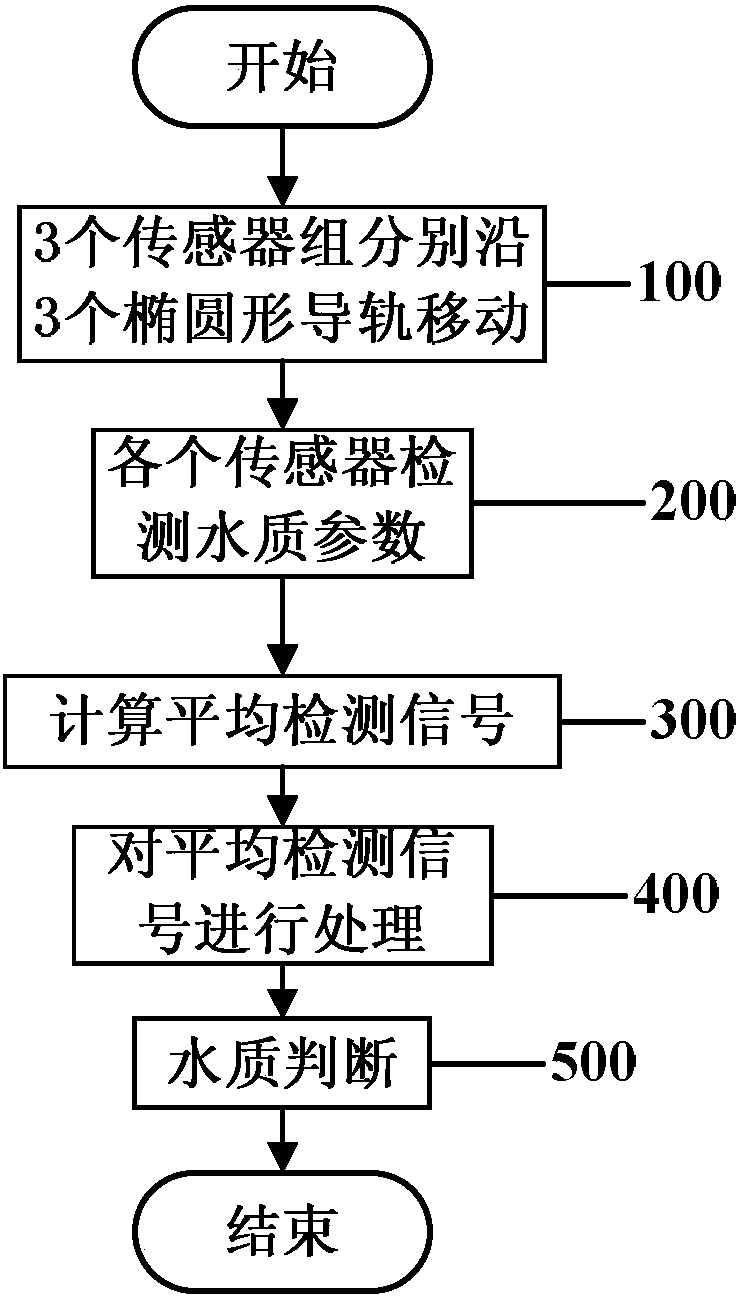
(1-1)每个水质检测装置的处理器通过驱动电机控制2个滚轮转动,壳体带动传感器组从靠近废水池壁处至废水池中部做往复运动;
(1-2)每个传感器组均包括重金属传感器、氨氮传感器、余氯传感器、pH值传感器、二氧化氯传感器、钠离子传感器、COD生物传感器、浊度传感器;
(1-3)每个水质检测装置的处理器控制无线发射器发送各个传感器的检测信号,无线接收器接收检测信号,计算机将每种传感器的检测信号进行平均,得到每种传感器的平均检测信号;
(1-4)对平均检测信号均进行如下处理:
对于每个传感器的平均检测信号中的每个时刻t,计算机计算t-T时刻至t时刻的电压幅度均值VU(t)、电压幅度最大值MA(t)和电压幅度最小值MI(t);
设定
其中,设定重金属传感器、氨氮传感器、余氯传感器、pH值传感器、二氧化氯传感器、钠离子传感器、COD生物传感器、浊度传感器的V(t)分别为Vs1(t)、Vs2(t)、Vs3(t)、Vs4(t)、Vs5(t)、Vs6(t)、Vs7(t)、Vs8(t);
(1-5)利用公式
计算综合判断指标Eva(t);
当Eva(t)≥R1的时候,计算机做出当前时刻水质良好的判断;
当R1>Eva(t)≥R2,计算机做出当前时刻水质中性的判断;
当Eva(t) 2.根据权利要求1所述的养殖场废水处理效果实时监测方法,其特征是,对步骤(1-3)中的平均检测信号进行如下处理: 设每种传感器的平均检测信号为s(n)=[s(0),s(1),...,s(n-1)],利用公式对s(i)的继承连续性进行判定, 当或则将s(i)删除,i=1,2,...,n-2; 得到满足继承连续性的平均检测信号。 3.根据权利要求1所述的养殖场废水处理效果实时监测方法,所述壳体下部设有用于容纳各个传感器的筒状金属网,壳体内设有气缸(8),气缸的伸缩杆下端与筒状金属网上端连接,气缸与处理器电连接;其特征是, 步骤(1-2)中还包括如下步骤:处理器控制气缸带动金属网下降至存储器中预设的高度。 4.根据权利要求1所述的养殖场废水处理效果实时监测方法,其特征是,壳体下部设有下端开口的导向筒,金属网位于导向筒中,导向筒周壁上设有若干交错排列的通孔;金属网通过若干个滑块与导向筒内周面接触,导向筒下边缘内侧设有与金属网接触的环形毛刷。 5.根据权利要求1所述的养殖场废水处理效果实时监测方法,其特征是,步骤(1-3)和(1-4)之间还包括如下修正步骤: 计算机在平均检测信号中选取若干个时间间隔为Δt的采样值,各个采样值按照时间先后顺序排列构成检测信号I(t); 对于I(t)中第一个采样值和最后一个采样值之外的每个采样值ES(t1),利用公式计算平稳系数ratio; 计算机中预先设有依次增大的权重阈值0.5,1和1.65; 对于ratio位于[1-A1,1+A1]范围内的采样值,将采样值修正为B1ES(t1),A1为0.2至0.3,B1为小于0.4的实数; 对于ratio位于(0.6,1-A1)或(1+A1,1.65)范围内的采样值,将采样值修正为B2ES(t1), 用修正过的各个采样值代替I(t)中的对应采样值,得到经过修正的检测信号I(t),用检测信号I(t)替换平均检测信号。 6.根据权利要求1或2或3或4或5所述的养殖场废水处理效果实时监测方法,其特征是,R1为5.7至6.3;R2为2.1至3.4。 说明书 养殖场废水处理效果实时监测方法 技术领域 本发明涉及水质检测技术领域,尤其是涉及一种检测灵敏度高,准确性好的养殖场废水处理效果实时监测方法。 背景技术 从传感器和信息监测技术的发展来看,成熟、稳定、高性能的传感器产品已经被应用到各类监测系统中,配合合适的传感器数据采集系统,期望达到信息采集的最优化。但由于户外监测环境变化较大、监测信息格式复杂、信息量大,如果不能有效地对这些数据进行预判和及时处理,很多异常数据将不能有效辨识,缺失信息将降低传感器系统监测的有效性,而且监测数据的分析必须建立在准确有效的监测数据之上,错误或者异常的监测数据将降低数值分析的结果,从而影响到系统的功能与特性分析,给后续数据处理带来很大的误差,正常信息不能得到有效利用。 发明内容 本发明的发明目的是为了克服现有技术中的监测方法的传感器存在采集偶然误差的不足,提供了一种检测灵敏度高,准确性好的养殖场废水处理效果实时监测方法。 为了实现上述目的,本发明采用以下技术方案: 一种养殖场废水处理效果实时监测方法,包括计算机、无线接收器、3个设于废水池中的椭圆形导轨;各个椭圆形导轨一端均与废水池壁连接,另一端均伸到废水池中部;每个椭圆形导轨上均设有水质检测装置,每个水质检测装置均包括壳体,设于壳体内的处理器,存储器,无线发射器和驱动电机,壳体下部设有可伸入水中的传感器组;每个水质检测装置均通过两个滚轮与椭圆形导轨接触,驱动电机与设于两个滚轮之间的转轴连接;每个水质检测装置的处理器分别与存储器、无线发射器、驱动电机和传感器组电连接;无线接收器与计算机电连接; 包括如下步骤: (1-1)每个水质检测装置的处理器通过驱动电机控制2个滚轮转动,壳体带动传感器组从靠近废水池壁处至废水池中部做往复运动; (1-2)每个传感器组均包括重金属传感器、氨氮传感器、余氯传感器、pH值传感器、二氧化氯传感器、钠离子传感器、COD生物传感器、浊度传感器; 重金属传感器用于检测重金属离子,铬、汞等;氨氮传感器用于检测水体当中的氨氮含量指标,余氯传感器用于检测余氯含量,二氧化氯传感器用于检测氯的氧化物含量,钠离子传感器用于检测钠离子的含量,COD生物传感器用于检测化学耗氧量指标,pH值传感器用于检测pH值,浊度传感器用于检测浊度。 (1-3)每个水质检测装置的处理器控制无线发射器发送各个传感器的检测信号,无线接收器接收检测信号,计算机将每种传感器的检测信号进行平均,得到每种传感器的平均检测信号; (1-4)对平均检测信号均进行如下处理: 对于每个传感器的平均检测信号中的每个时刻t,计算机计算t-T时刻至t时刻的电压幅度均值VU(t)、电压幅度最大值MA(t)和电压幅度最小值MI(t); 设定 其中, 设定重金属传感器、氨氮传感器、余氯传感器、pH值传感器、二氧化氯传感器、钠离子传感器、COD生物传感器、浊度传感器的V(t)分别为Vs1(t)、Vs2(t)、Vs3(t)、Vs4(t)、Vs5(t)、Vs6(t)、Vs7(t)、Vs8(t); (1-5)利用公式 计算综合判断指标Eva(t); 当Eva(t)≥R1的时候,计算机做出当前时刻水质良好的判断; 当R1>Eva(t)≥R2,计算机做出当前时刻水质中性的判断; 当Eva(t) 本发明的各个传感器组可沿各个椭圆形导轨移动,从而使检测的信号更加均匀、准确,重金属传感器、氨氮传感器、余氯传感器、pH值传感器、二氧化氯传感器、钠离子传感器、COD生物传感器、浊度传感器可以全面测量废水池的水质,处理器控制无线发射器发送检测信号,无线接收器接收检测信号,计算机对检测信号进行处理并做出水质判断。 作为优选,对步骤(1-3)中的平均检测信号进行如下处理: 设每种传感器的平均检测信号为s(n)=[s(0),s(1),...,s(n-1)],利用公式对s(i)的继承连续性进行判定, 当或则将s(i)删除,i=1,2,...,n-2; 得到满足继承连续性的平均检测信号。 作为优选,所述壳体下部设有用于容纳各个传感器的筒状金属网,壳体内设有气缸,气缸的伸缩杆下端与筒状金属网上端连接,气缸与处理器电连接;步骤(1-2)中还包括如下步骤:处理器控制气缸带动金属网下降至存储器中预设的高度。 作为优选,壳体下部设有下端开口的导向筒,金属网位于导向筒中,导向筒周壁上设有若干交错排列的通孔;金属网通过若干个滑块与导向筒内周面接触,导向筒下边缘内侧设有与金属网接触的环形毛刷。 作为优选,步骤(1-3)和(1-4)之间还包括如下修正步骤: 计算机在平均检测信号中选取若干个时间间隔为Δt的采样值,各个采样值按照时间先后顺序排列构成检测信号I(t); 对于I(t)中第一个采样值和最后一个采样值之外的每个采样值ES(t1),利用公式计算平稳系数ratio; 计算机中预先设有依次增大的权重阈值0.5,1和1.65; 对于ratio位于[1-A1,1+A1]范围内的采样值,将采样值修正为B1 ES(t1),A1为0.2至0.3,B1为小于0.4的实数; 对于ratio位于(0.6,1-A1)或(1+A1,1.65)范围内的采样值,将采样值修正为B2ES(t1),B1 用修正过的各个采样值代替I(t)中的对应采样值,得到经过修正的检测信号I(t),用检测信号I(t)替换平均检测信号。 作为优选,R1为5.7至6.3;R2为2.1至3.4。 因此,本发明具有如下有益效果:检测灵敏度高,准确性好,监测范围广。

