
ЁЁЁЁЩъЧыШе2018.07.09
ЁЁЁЁЙЋПЊ(ЙЋИц)Ше2018.12.07
ЁЁЁЁIPCЗжРрКХC02F9/14
ЁЁЁЁеЊвЊ
ЁЁЁЁБОЗЂУїЙЋПЊСЫвЛжжЮлЫЎДІРэЩшБИЃЌЫљЪіЮлЫЎДІРэЩшБИАќРЈвРДЮСЌЭЈЕФдЄДІРэГиЁЂЛьвКГиЁЂЖЏЬЌФЄГиКЭГСЕэГиЃЌЫљЪіГСЕэГиАќРЈЕквЛЮлЫЎГіПкКЭЕкЖўЮлЫЎГіПкЃЌЫљЪіЕквЛЮлЫЎГіПкЭЈЙ§ЕквЛЕїНкЗЇгыЩњЮяДІРэГиСЌЭЈЃЌЫљЪіЕкЖўЮлЫЎГіПкЭЈЙ§ЕкЖўЕїНкЗЇгыЯТЫЎЙмЕРСЌЭЈЃЌЫљЪіЩњЮяДІРэГиЕФГіПкЭЈЙ§ЕкШ§ЕїНкЗЇгыЫљЪіЯТЫЎЙмЕРСЌЭЈЁЃБОЗЂУїЖРДДадЕФЩшМЦСЫгУгкЭЖЗХЬэМгМСЕФЭЖжРЛњЦїШЫЃЌвдМАгУгкзМШЗЦРЙРЫЎЕФpHжЕвдМАзЧЖШжЕЕФЪ§ОнДІРэЫуЗЈЃЌвдМАЖдИїИіПЊЙивдМАЕїНкЗЇЕФПижЦЫуЗЈЁЃздЖЏЛЏГЬЖШИпЃЌФмЙЛЪЕЯжШЋздЖЏДІРэ;ТГАєадЧПЃЌФмЙЛЦСБЮИїжжПЩФмЕМжТЦРЙРЮѓВюЕФвђЫиЃЌДгЖјЪЙЕУЖдгкЮлЫЎPHжЕКЭзЧЖШжЕЕФЦРЙРНсЙћзуЙЛзМШЗЃЌвђДЫЃЌПижЦОЋЖШИпЁЃ
ЁЁЁЁШЈРћвЊЧѓЪщ
ЁЁЁЁ1.вЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃЌЫљЪіЮлЫЎДІРэЩшБИАќРЈвРДЮСЌЭЈЕФдЄДІРэГиЁЂЛьвКГиЁЂЖЏЬЌФЄГиКЭГСЕэГиЃЌЫљЪіГСЕэГиАќРЈЕквЛЮлЫЎГіПкКЭЕкЖўЮлЫЎГіПкЃЌЫљЪіЕквЛЮлЫЎГіПкЭЈЙ§ЕквЛЕїНкЗЇгыЩњЮяДІРэГиСЌЭЈЃЌЫљЪіЕкЖўЮлЫЎГіПкЭЈЙ§ЕкЖўЕїНкЗЇгыЯТЫЎЙмЕРСЌЭЈЃЌЫљЪіЩњЮяДІРэГиЕФГіПкЭЈЙ§ЕкШ§ЕїНкЗЇгыЫљЪіЯТЫЎЙмЕРСЌЭЈЁЃ
ЁЁЁЁ2.ИљОнШЈРћвЊЧѓ1ЫљЪіЕФвЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃЌЫљЪіЛьвКГиИННќЩшжУгаЬэМгМСЭЖжРЛњЦїШЫЃЌЫљЪіЬэМгМСЭЖжРЛњЦїШЫгУгкЯђЛьвКГиЭЖЗХЖЏЬЌФЄЩњГЩМСЃЌЫљЪіГСЕэГиИННќЩшжУгаШЁбљЛњЦїШЫЃЌЦфжаШЁбљЛњЦїШЫЮЊСљжсДЎСЊЛњЦїШЫЁЃ
ЁЁЁЁ3.ИљОнШЈРћвЊЧѓ1ЫљЪіЕФвЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃК
ЁЁЁЁЫљЪіЬэМгМСЭЖжРЛњЦїШЫКЭЫљЪіШЁбљЛњЦїШЫОљЪмПигкзмПижЦЦїЃЌЫљЪізмПижЦЛЙгУгкПижЦЕквЛЕїНкЗЇЁЂЕкЖўЕїНкЗЇКЭЕкШ§ЕїНкЗЇЕФПЊБе;ЫљЪіШЁбљЛњЦїШЫгУгкВЩМЏГСЕэГиЫЎбљВЂМьВтОЙ§ЖЏЬЌФЄГижЎКѓЕФЮлЫЎЪЧЗёДяЕНХХЗХБъзМЃЌШєЗёЃЌдђзмПижЦЦїПЊЦєЕквЛЕїНкЗЇЃЌШєЪЧЃЌдђзмПижЦЦїПЊЦєЕкЖўЕїНкЗЇЁЃ
ЁЁЁЁ4.ИљОнШЈРћвЊЧѓ3ЫљЪіЕФвЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃК
ЁЁЁЁЫљЪіЭЖжРЛњЦїШЫАќРЈЛљзљЁЂЖЏЦНЬЈЁЂЛњаЕзЅЪжЃЌЦфжаЛљзљЭЈЙ§Ш§ЬѕжЇСДгыЖЏЦНЬЈСЌНгЃЌШ§ЬѕжЇСДжаЕквЛжЇСДЮЊЫЋЦНааЫФБпаЮНсЙЙЃЌЦфжаЩЯЦНааЫФБпаЮНсЙЙЕФЕквЛСЌИЫЭЈЙ§ЕквЛзЊЖЏИБгыЛљзљЯрСЌЃЌЕквЛСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЖўзЊЖЏИБгыЕкШ§СЌИЫЕФвЛЖЫЯрСЌЃЌЕкШ§СЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЫФзЊЖЏИБгыЕкЖўСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЖўСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкШ§зЊЖЏИБгыЛљзљЯрСЌ;
ЁЁЁЁЯТЦНааЫФБпаЮНсЙЙЕФЕкЫФСЌИЫЕФвЛЖЫЭЈЙ§ЕкСљзЊЖЏИБгыЕкЮхСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЮхСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЦпзЊЖЏИБгыЖЏЦНЬЈЯрСЌЃЌЕкЫФСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкАЫзЊЖЏИБгыЕкСљСЌИЫЕФвЛЖЫЯрСЌЃЌЕкСљСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкОХзЊЖЏИБгыЖЏЦНЬЈЯрСЌЃЌЦфжаЩЯЦНааЫФБпаЮНсЙЙЕФЕкШ§СЌИЫжаВПгыЯТЦНааЫФБпаЮНсЙЙЕФЕкЫФСЌИЫжаВПЭЈЙ§ЕкЮхзЊЖЏИБНјааСЌНг;
ЁЁЁЁЕкЖўжЇСДЭЈЙ§ЕкЦпСЌИЫЕФвЛЖЫЭЈЙ§ЕкЪЎзЊЖЏИБгыЛљзљЯрСЌЃЌЕкЦпСЌИЫЕФСэвЛЖЫЭЈЙ§ЕквЛвЦЖЏИБгыЕкАЫСЌИЫЕФвЛЖЫЯрСЌЃЌЕкАЫСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЪЎвЛзЊЖЏИБгыЖЏЦНЬЈЯрСЌ;
ЁЁЁЁЕкШ§жЇСДЭЈЙ§ЕкОХСЌИЫЕФвЛЖЫЭЈЙ§ЕкЪЎЖўзЊЖЏИБгыЛљзљЯрСЌЃЌЕкОХСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЖўвЦЖЏИБгыЕкЪЎСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЪЎСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЪЎШ§зЊЖЏИБгыЖЏЦНЬЈЯрСЌЁЃ
ЁЁЁЁ5.ИљОнШЈРћвЊЧѓ4ЫљЪіЕФвЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃК
ЁЁЁЁЫљЪіЛњаЕзЅЪжЩшжУдкЖЏЦНЬЈЩЯЃЌЫљЪіЛњаЕзЅЪжЮЊЧЏЪНзЅЪжЁЃ
ЁЁЁЁ6.ИљОнШЈРћвЊЧѓ5ЫљЪіЕФвЛжжЮлЫЎДІРэЩшБИЃЌЦфЬиеїдкгкЃК
ЁЁЁЁЫљЪіЛњаЕзЅЪжУПДЮзЅШЁЙЬЖЈЪ§СПЕФЬэМгМСЃЌВЂНЋЦфЭЖШыЛьвКГи;ЫљЪіЬэМгМСЭЖжРЛњЦїШЫЫљЭЖжРЕФЖЏЬЌФЄЩњГЩМСПЩвдЮЊЛьФ§ЭСЗлФЉЁЂШЫЙЄЪїжЌЕШОпБИФ§аѕЙІФмЕФвзгкЩњГЩЖЏЬЌФЄЕФВФСЯЁЃ
ЁЁЁЁЫЕУїЪщ
ЁЁЁЁвЛжжЮлЫЎДІРэЩшБИ
ЁЁЁЁММЪѕСьгђ
ЁЁЁЁБОЗЂУїЩцМАЛЗБЃзАБИСьгђЃЌгШЦфЩцМАвЛжжЮлЫЎДІРэЩшБИЁЃ
ЁЁЁЁБГОАММЪѕ
ЁЁЁЁЮлЫЎДІРэ(sewage treatment,wastewater treatment)ЃКЮЊЪЙЮлЫЎДяЕНХХШыФГвЛЫЎЬхЛђдйДЮЪЙгУЕФЫЎжЪвЊЧѓЖдЦфНјааОЛЛЏЕФЙ§ГЬЁЃЮлЫЎДІРэБЛЙуЗКгІгУгкНЈжўЁЂХЉвЕЁЂНЛЭЈЁЂФмдДЁЂЪЏЛЏЕШЖрИіСьгђЁЃВЛЭЌСьгђЕФЮлЫЎДІРэЗНЗЈВЛЭЌЃЌЮяРэЗЈЁЂЩњЛЏЗЈЕФОпЬхЪЙгУЗНЪНвВВюБ№НЯДѓЁЃ
ЁЁЁЁдкЖдЮлЫЎНјааДІРэЕФЙ§ГЬжаЃЌЩњЮяФЄЗЈдкНќМИФъвьОќЭЛЦ№ЃЌЕЋЪЧЩњЮяФЄЗЈвВДцдквЛЖЈЕФЮЪЬтЃЌБШШчЩњЮяФЄЕФЩњГЩФбвдПижЦЃЌЩњЮяФЄЕФадФмВЛЙЛЮШЖЈЃЌвђДЫЃЌЛљгкЩњЮяФЄНјааЮлЫЎДІРэФбвдЪЕЯжздЖЏЛЏЃЌвВФбвдДяЕННЯКУЕФДІРэаЇЙћЁЃ
ЁЁЁЁЗЂУїФкШн
ЁЁЁЁЮЊСЫНтОіЩЯЪіММЪѕЮЪЬтЃЌБОЗЂУїЬсЙЉвЛжжЮлЫЎДІРэЩшБИЁЃ
ЁЁЁЁБОЗЂУїЪЧвдШчЯТММЪѕЗНАИЪЕЯжЕФЃК
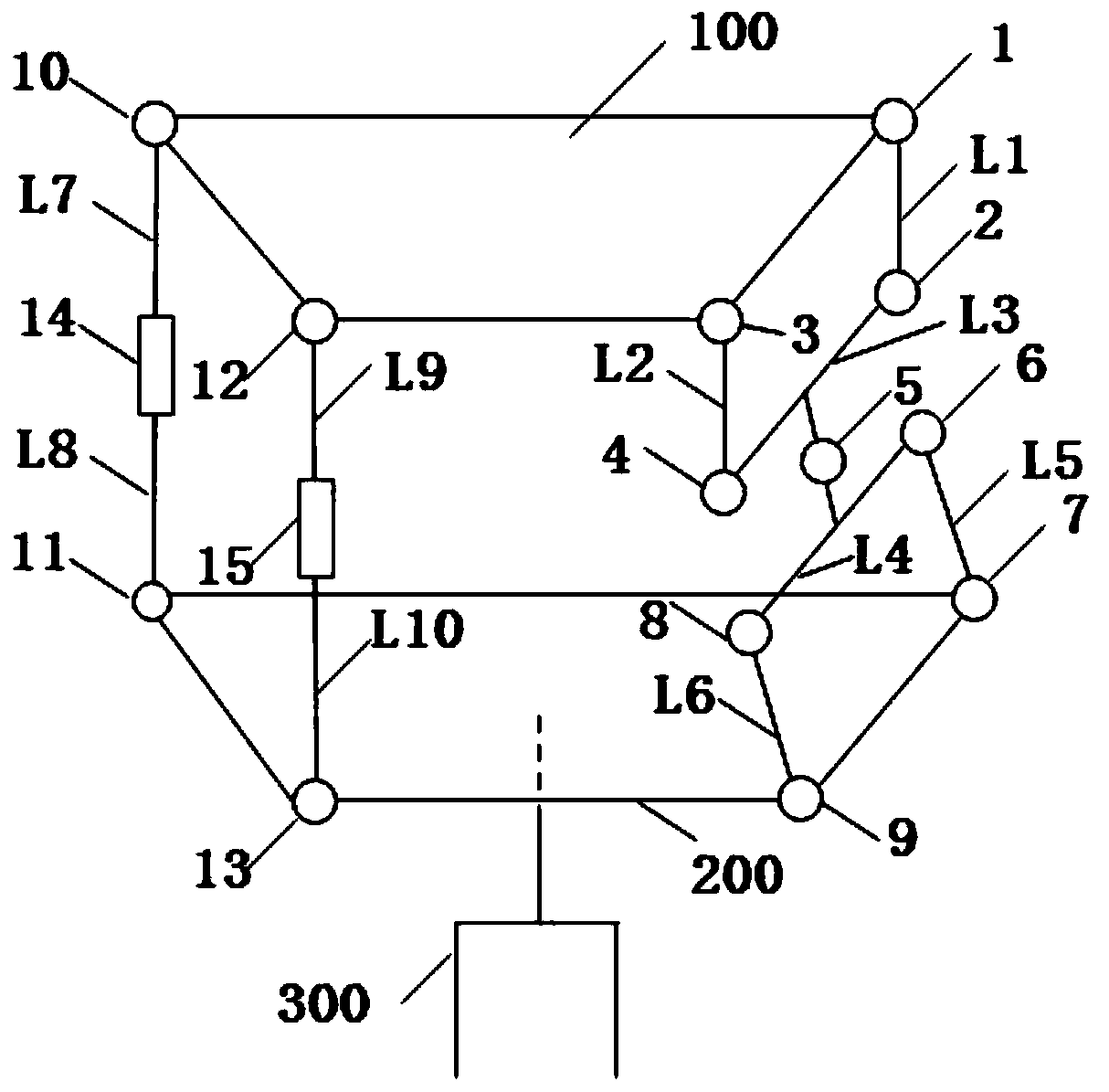
ЁЁЁЁвЛжжЮлЫЎДІРэЩшБИЃЌЫљЪіЮлЫЎДІРэЩшБИАќРЈвРДЮСЌЭЈЕФдЄДІРэГиЁЂЛьвКГиЁЂЖЏЬЌФЄГиКЭГСЕэГиЃЌЫљЪіГСЕэГиАќРЈЕквЛЮлЫЎГіПкКЭЕкЖўЮлЫЎГіПкЃЌЫљЪіЕквЛЮлЫЎГіПкЭЈЙ§ЕквЛЕїНкЗЇгыЩњЮяДІРэГиСЌЭЈЃЌЫљЪіЕкЖўЮлЫЎГіПкЭЈЙ§ЕкЖўЕїНкЗЇгыЯТЫЎЙмЕРСЌЭЈЃЌЫљЪіЩњЮяДІРэГиЕФГіПкЭЈЙ§ЕкШ§ЕїНкЗЇгыЫљЪіЯТЫЎЙмЕРСЌЭЈЁЃ
ЁЁЁЁНјвЛВНЕиЃЌЫљЪіЛьвКГиИННќЩшжУгаЬэМгМСЭЖжРЛњЦїШЫЃЌЫљЪіЬэМгМСЭЖжРЛњЦїШЫгУгкЯђЛьвКГиЭЖЗХЖЏЬЌФЄЩњГЩМСЃЌЫљЪіГСЕэГиИННќЩшжУгаШЁбљЛњЦїШЫЃЌЦфжаШЁбљЛњЦїШЫЮЊСљжсДЎСЊЛњЦїШЫЁЃ
ЁЁЁЁНјвЛВНЕиЃЌЫљЪіЬэМгМСЭЖжРЛњЦїШЫКЭЫљЪіШЁбљЛњЦїШЫОљЪмПигкзмПижЦЦїЃЌЫљЪізмПижЦЛЙгУгкПижЦЕквЛЕїНкЗЇЁЂЕкЖўЕїНкЗЇКЭЕкШ§ЕїНкЗЇЕФПЊБе;ЫљЪіШЁбљЛњЦїШЫгУгкВЩМЏГСЕэГиЫЎбљВЂМьВтОЙ§ЖЏЬЌФЄГижЎКѓЕФЮлЫЎЪЧЗёДяЕНХХЗХБъзМЃЌШєЗёЃЌдђзмПижЦЦїПЊЦєЕквЛЕїНкЗЇЃЌШєЪЧЃЌдђзмПижЦЦїПЊЦєЕкЖўЕїНкЗЇЁЃ
ЁЁЁЁНјвЛВНЕиЃЌЫљЪіЭЖжРЛњЦїШЫАќРЈЛљзљЁЂЖЏЦНЬЈЁЂЛњаЕзЅЪжЃЌЦфжаЛљзљЭЈЙ§Ш§ЬѕжЇСДгыЖЏЦНЬЈСЌНгЃЌШ§ЬѕжЇСДжаЕквЛжЇСДЮЊЫЋЦНааЫФБпаЮНсЙЙЃЌЦфжаЩЯЦНааЫФБпаЮНсЙЙЕФЕквЛСЌИЫЭЈЙ§ЕквЛзЊЖЏИБгыЛљзљЯрСЌЃЌЕквЛСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЖўзЊЖЏИБгыЕкШ§СЌИЫЕФвЛЖЫЯрСЌЃЌЕкШ§СЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЫФзЊЖЏИБгыЕкЖўСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЖўСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкШ§зЊЖЏИБгыЛљзљЯрСЌ;
ЁЁЁЁЯТЦНааЫФБпаЮНсЙЙЕФЕкЫФСЌИЫЕФвЛЖЫЭЈЙ§ЕкСљзЊЖЏИБгыЕкЮхСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЮхСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЦпзЊЖЏИБгыЖЏЦНЬЈЯрСЌЃЌЕкЫФСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкАЫзЊЖЏИБгыЕкСљСЌИЫЕФвЛЖЫЯрСЌЃЌЕкСљСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкОХзЊЖЏИБгыЖЏЦНЬЈЯрСЌЃЌЦфжаЩЯЦНааЫФБпаЮНсЙЙЕФЕкШ§СЌИЫжаВПгыЯТЦНааЫФБпаЮНсЙЙЕФЕкЫФСЌИЫжаВПЭЈЙ§ЕкЮхзЊЖЏИБНјааСЌНг;
ЁЁЁЁЕкЖўжЇСДЭЈЙ§ЕкЦпСЌИЫЕФвЛЖЫЭЈЙ§ЕкЪЎзЊЖЏИБгыЛљзљЯрСЌЃЌЕкЦпСЌИЫЕФСэвЛЖЫЭЈЙ§ЕквЛвЦЖЏИБгыЕкАЫСЌИЫЕФвЛЖЫЯрСЌЃЌЕкАЫСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЪЎвЛзЊЖЏИБгыЖЏЦНЬЈЯрСЌ;
ЁЁЁЁЕкШ§жЇСДЭЈЙ§ЕкОХСЌИЫЕФвЛЖЫЭЈЙ§ЕкЪЎЖўзЊЖЏИБгыЛљзљЯрСЌЃЌЕкОХСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЖўвЦЖЏИБгыЕкЪЎСЌИЫЕФвЛЖЫЯрСЌЃЌЕкЪЎСЌИЫЕФСэвЛЖЫЭЈЙ§ЕкЪЎШ§зЊЖЏИБгыЖЏЦНЬЈЯрСЌЁЃ
ЁЁЁЁНјвЛВНЕиЃЌЫљЪіЛњаЕзЅЪжЩшжУдкЖЏЦНЬЈЩЯЃЌЫљЪіЛњаЕзЅЪжЮЊЧЏЪНзЅЪжЁЃ
ЁЁЁЁНјвЛВНЕиЃЌЫљЪіЛњаЕзЅЪжУПДЮзЅШЁЙЬЖЈЪ§СПЕФЬэМгМСЃЌВЂНЋЦфЭЖШыЛьвКГи;ЫљЪіЬэМгМСЭЖжРЛњЦїШЫЫљЭЖжРЕФЖЏЬЌФЄЩњГЩМСПЩвдЮЊЛьФ§ЭСЗлФЉЁЂШЫЙЄЪїжЌЕШОпБИФ§аѕЙІФмЕФвзгкЩњГЩЖЏЬЌФЄЕФВФСЯЁЃ
ЁЁЁЁБОЗЂУїЕФгавцаЇЙћЪЧЃК
ЁЁЁЁБОЗЂУїЙЋПЊСЫвЛжжгУгкНјааЮлЫЎДІРэЕФЛЗБЃЩшБИЃЌЦфАќРЈЖрИіЫЎДІРэГиЃЌВЂЖРДДадЕФЩшМЦСЫгУгкЭЖЗХЬэМгМСЕФЭЖжРЛњЦїШЫЃЌвдМАгУгкзМШЗЦРЙРЫЎЕФpHжЕвдМАзЧЖШжЕЕФЪ§ОнДІРэЫуЗЈЃЌвдМАЖдИїИіПЊЙивдМАЕїНкЗЇЕФПижЦЫуЗЈЁЃЭЈЙ§ЩЯЪіЖРДДадЩшМЦЪЙЕУБОЩъЧыжаЕФЛЗБЃЩшБИОпБИЯТЪігХЪЦЃКздЖЏЛЏГЬЖШИпЃЌФмЙЛЪЕЯжШЋздЖЏДІРэ;ТГАєадЧПЃЌФмЙЛЦСБЮИїжжПЩФмЕМжТЦРЙРЮѓВюЕФвђЫиЃЌДгЖјЪЙЕУЖдгкЮлЫЎPHжЕКЭзЧЖШжЕЕФЦРЙРНсЙћзуЙЛзМШЗЃЌвђДЫЃЌПижЦОЋЖШИпЁЃ





