
°°°°…к«л»’2018.07.09
°°°°єЂњ™(єЂЄж)»’2018.12.07
°°°°IPCЈ÷јаЇ≈C02F9/14
°°°°’™“™
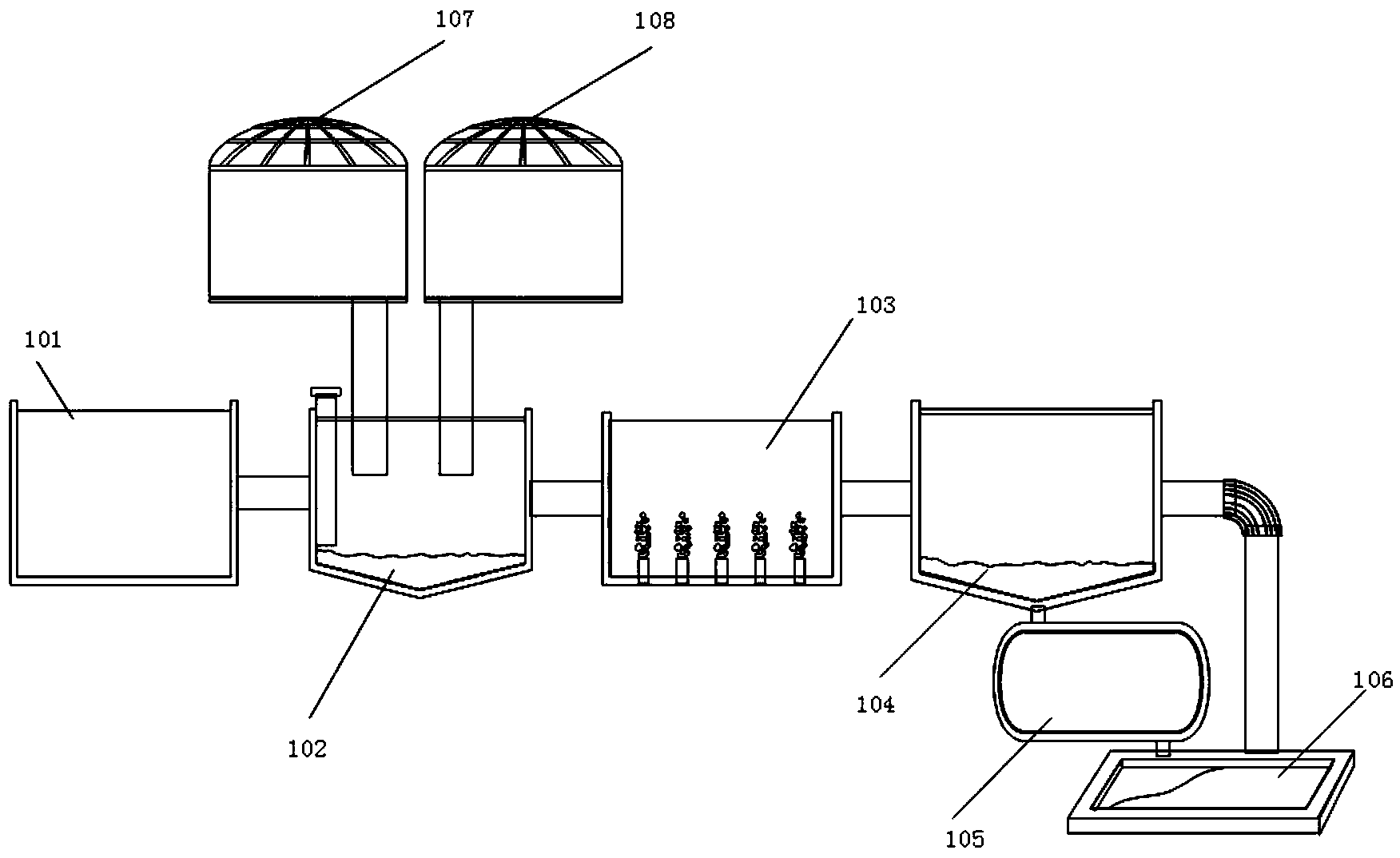
°°°°±ЊЈҐ√чєЂњ™ЅЋ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђЋщ цѕµЌ≥∞ьј®“јіќЅђЌ®µƒ‘§і¶јн≥Ў°Ґїм“Ї≥Ў°Ґґѓћђƒ§≥ЎЇЌ≥Ѕµн≥Ў;Ћщ цїм“Ї≥ЎЄљљь…и÷√”–ћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ”√”Џѕтїм“Ї≥ЎЌґЈ≈ґѓћђƒ§…ъ≥…ЉЅ£ђЋщ ц≥Ѕµн≥ЎЄљљь…и÷√”–»°—щїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»ЋЇЌЋщ ц»°—щїъ∆ч»ЋЊщ №њЎ”Џ„№њЎ÷∆∆ч;Ћщ ц‘§і¶јн≥Ў≥цњЏ…и÷√”–ќџЋЃЅчЌ®њ™єЎ£ђЋщ цќџЋЃЅчЌ®њ™єЎ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч;Ћщ цїм“Ї≥ЎЌ®єэµЏЋƒњЎ÷∆ЈІ”볥Ћб∆чЅђЌ®£ђЌ®єэµЏќењЎ÷∆ЈІ”볥Љо∆чЅђЌ®£ђЋщ цµЏЋƒњЎ÷∆ЈІЇЌµЏќењЎ÷∆ЈІЊщ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч°£±ЊЈҐ√чґјіі–‘µƒ…иЉ∆ єµ√ґ‘”ЏќџЋЃPH÷µЇЌ„«ґ»÷µµƒ∆јєјљбєы„гєї„Љ»Ј£ђ“тіЋ£ђњЎ÷∆ЊЂґ»Єя°£
°°°°»®јы“™«у й
°°°°1.“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ђЋщ цѕµЌ≥∞ьј®“јіќЅђЌ®µƒ‘§і¶јн≥Ў°Ґїм“Ї≥Ў°Ґґѓћђƒ§≥ЎЇЌ≥Ѕµн≥Ў;Ћщ цїм“Ї≥ЎЄљљь…и÷√”–ћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ”√”Џѕтїм“Ї≥ЎЌґЈ≈ґѓћђƒ§…ъ≥…ЉЅ£ђЋщ ц≥Ѕµн≥ЎЄљљь…и÷√”–»°—щїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»ЋЇЌЋщ ц»°—щїъ∆ч»ЋЊщ №њЎ”Џ„№њЎ÷∆∆ч;Ћщ ц‘§і¶јн≥Ў≥цњЏ…и÷√”–ќџЋЃЅчЌ®њ™єЎ£ђЋщ цќџЋЃЅчЌ®њ™єЎ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч;Ћщ цїм“Ї≥ЎЌ®єэµЏЋƒњЎ÷∆ЈІ”볥Ћб∆чЅђЌ®£ђЌ®єэµЏќењЎ÷∆ЈІ”볥Љо∆чЅђЌ®£ђЋщ цµЏЋƒњЎ÷∆ЈІЇЌµЏќењЎ÷∆ЈІЊщ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч°£
°°°°2.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£ђЋщ ц‘§і¶јн≥Ў±їґаЄцєэ¬Ћ∞еЈ÷Єоќ™ґаЄц«ї “£ђ√њЄцєэ¬Ћ∞е…ѕЊщ…и÷√”–ґаЄцЅђЌ®њ„£ђЋщ цЅђЌ®њ„”√”ЏЄƒ±дЋЃЅчЋўґ»їт’яЄƒ±дЋЃЅчЋўґ»“‘Љ∞Јљѕт£ђ—ЎќџЋЃЅчґѓЈљѕтєэ¬Ћ∞еµƒєэ¬Ћњ„Њґ“јіќљµµЌ£ђњњљьЋщ ц‘§і¶јн≥Ў≥цњЏі¶µƒєэ¬Ћ∞е÷–єэ¬Ћњ„µƒ÷±Њґ–°”Џ0.2cm°£
°°°°3.ЄщЊЁ»®јы“™«у1Ћщ цµƒ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£Ї
°°°°Ћщ цїм“Ї≥ЎƒЏЋжїъќї÷√…и÷√”–ґаЄціЂЄ–∆ч„й£ђ√њЄціЂЄ–∆ч„йЊщ∞ьј®PHЉм≤в∆чЇЌ„«ґ»Љм≤в∆ч£ђЋщ цїм“Ї≥Ўµƒ÷––ƒ…и÷√”–“ЇќїіЂЄ–∆ч£ђіЂЄ–∆ч„й“‘Љ∞Ћщ ц“ЇќїіЂЄ–∆чЊщ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч°£
°°°°4.ЄщЊЁ»®јы“™«у3Ћщ цµƒ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£Ї
°°°°Ћщ ц“ЇќїіЂЄ–∆ч”√”Џ≤вЅњЋщ цїм“Ї≥Ў÷–µƒ“Їќї£ђµ±“Їќїµљіп‘§…и÷µµЂ «≤ҐќіµљіпЈвґ•÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤Љ эЊЁ≤…Љѓ÷ЄЅо£ђµ±“ЇќїµљіпЈвґ•÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤ЉЊѓ±®÷ЄЅо£ђµ±“ЇќїµљіпЈвµ„÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤ЉЊѓ±®љв≥э÷ЄЅо;Ћщ ц„№њЎ÷∆∆чѕм”¶”ЏЋщ ц эЊЁ≤…Љѓ÷ЄЅо£ђ«эґѓіЂЄ–∆ч„йљш–– эЊЁ≤…Љѓ£ђѕм”¶”ЏЋщ цЊѓ±®÷ЄЅо£ђЋщ ц„№њЎ÷∆∆чњЎ÷∆Ћщ цќџЋЃЅчЌ®њ™єЎєЎ±’£ђѕм”¶”ЏЋщ цЊѓ±®љв≥э÷ЄЅо£ђЋщ ц„№њЎ÷∆∆чњЎ÷∆Ћщ цќџЋЃЅчЌ®њ™єЎњ™∆ф°£
°°°°5.ЄщЊЁ»®јы“™«у4Ћщ цµƒ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£Ї
°°°°ѕм”¶”ЏЋщ ц эЊЁ≤…Љѓ÷ЄЅо£ђЄч„й„«ґ»Љм≤в∆ч≤…Љѓp„й эЊЁ£ђЄч„йPHЉм≤вїъ≤…Љѓ“їіќ эЊЁ≤Ґїг„№µљ„№њЎ÷∆∆ч£ђ”…Ћщ ц„№њЎ÷∆∆чљш–– эЊЁі¶јнЇу£ђ“јЊЁ эЊЁі¶јнљбєыњЎ÷∆ќџЋЃЅчЌ®њ™єЎµƒњ™±’;Ћщ ц эЊЁі¶јн∞ьј®PH÷µі¶јнЇЌ„«ґ»÷µі¶јнЅљ≤њЈ÷ƒЏ»Ё°£
°°°°6.ЄщЊЁ»®јы“™«у5Ћщ цµƒ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥£ђ∆дћЎ’ч‘Џ”Џ£Ї
°°°°„«ґ»÷µі¶јнљбєы≤ї–°”Џ‘§…и„«ґ»÷µµЌѕё≤Ґ«“PH÷µµƒ эЊЁі¶јнљбєы‘Џ‘§…иPHг–÷µ«шЉд£ђ‘тќџЋЃЅчЌ®њ™єЎ≥ њ™∆ф„іћђ£ђ≤Ґ«“µЏЋƒњЎ÷∆ЈІЇЌµЏќењЎ÷∆ЈІ≥ єЎ±’„іћђ;Јс‘т£ђєЎ±’ќџЋЃЅчЌ®њ™єЎ;
°°°°»фЋщ ц„«ґ»÷µі¶јнљбєы–°”Џ‘§…и„«ґ»µЌ÷µ£ђњЎ÷∆Ћщ цћнЉ”ЉЅЌґ÷јїъ∆ч»ЋѕтЋщ цїм“Ї≥ЎЌґ÷ј“їіќ‘§…иЉЅЅњµƒґѓћђƒ§…ъ≥…ЉЅ;
°°°°»фЋщ цPH÷µµƒ эЊЁі¶јнљбєы–°”ЏЋщ цPHг–÷µ«шЉдµƒµЌ÷µ£ђњ™∆фµЏќењЎ÷∆ЈІ£ђ»фЋщ цPH÷µµƒ эЊЁі¶јнљбєыЄя”ЏЋщ цPHг–÷µ«шЉдµƒЄя÷µ£ђ‘тњ™∆фµЏЋƒњЎ÷∆ЈІ°£
°°°°Ћµ√ч й
°°°°“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥
°°°°ЉЉ хЅм”т
°°°°±ЊЈҐ√ч…жЉ∞їЈ±£„∞±ЄЅм”т£ђ”»∆д…жЉ∞“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥°£
°°°°±≥Њ∞ЉЉ х
°°°°ќџЋЃі¶јн(sewage treatment,wastewater treatment)£Їќ™ єќџЋЃіпµљ≈≈»лƒ≥“їЋЃћеїт‘ўіќ є”√µƒЋЃ÷ “™«уґ‘∆дљш––Њїїѓµƒєэ≥ћ°£ќџЋЃі¶јн±їєгЈЇ”¶”√”Џљ®÷ю°Ґ≈©“µ°ҐљїЌ®°Ґƒ№‘і°Ґ ѓїѓµ»ґаЄцЅм”т°£≤їЌђЅм”тµƒќџЋЃі¶јнЈљЈ®≤їЌђ£ђќпјнЈ®°Ґ…ъїѓЈ®µƒЊяће є”√Јљ љ“≤≤о±рљѕіу°£
°°°°‘Џґ‘ќџЋЃљш––і¶јнµƒєэ≥ћ÷–£ђ…ъќпƒ§Ј®‘ЏљьЉЄƒк“мЊьЌї∆р£ђµЂ «…ъќпƒ§Ј®“≤іж‘Џ“їґ®µƒќ ћв£ђ±»»з…ъќпƒ§µƒ…ъ≥…ƒ—“‘њЎ÷∆£ђ…ъќпƒ§µƒ–‘ƒ№≤їєїќ»ґ®£ђ“тіЋ£ђїщ”Џ…ъќпƒ§љш––ќџЋЃі¶јнƒ—“‘ µѕ÷„‘ґѓїѓ£ђ“≤ƒ—“‘іпµљљѕЇ√µƒі¶јн–Ієы°£
°°°°ЈҐ√чƒЏ»Ё
°°°°ќ™ЅЋљвЊц…ѕ цЉЉ хќ ћв£ђ±ЊЈҐ√чћбє©“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒ„‘ґѓњЎ÷∆ѕµЌ≥°£
°°°°±ЊЈҐ√ч «“‘»зѕ¬ЉЉ хЈљ∞Є µѕ÷µƒ£Ї
°°°°Ћщ цѕµЌ≥∞ьј®“јіќЅђЌ®µƒ‘§і¶јн≥Ў°Ґїм“Ї≥Ў°Ґґѓћђƒ§≥ЎЇЌ≥Ѕµн≥Ў;Ћщ цїм“Ї≥ЎЄљљь…и÷√”–ћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»Ћ”√”Џѕтїм“Ї≥ЎЌґЈ≈ґѓћђƒ§…ъ≥…ЉЅ£ђЋщ ц≥Ѕµн≥ЎЄљљь…и÷√”–»°—щїъ∆ч»Ћ£ђЋщ цћнЉ”ЉЅЌґ÷јїъ∆ч»ЋЇЌЋщ ц»°—щїъ∆ч»ЋЊщ №њЎ”Џ„№њЎ÷∆∆ч;Ћщ ц‘§і¶јн≥Ў≥цњЏ…и÷√”–ќџЋЃЅчЌ®њ™єЎ£ђЋщ цќџЋЃЅчЌ®њ™єЎ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч;Ћщ цїм“Ї≥ЎЌ®єэµЏЋƒњЎ÷∆ЈІ”볥Ћб∆чЅђЌ®£ђЌ®єэµЏќењЎ÷∆ЈІ”볥Љо∆чЅђЌ®£ђЋщ цµЏЋƒњЎ÷∆ЈІЇЌµЏќењЎ÷∆ЈІЊщ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч°£
°°°°љш“ї≤љµЎ£ђЋщ ц‘§і¶јн≥Ў±їґаЄцєэ¬Ћ∞еЈ÷Єоќ™ґаЄц«ї “£ђ√њЄцєэ¬Ћ∞е…ѕЊщ…и÷√”–ґаЄцЅђЌ®њ„£ђЋщ цЅђЌ®њ„”√”ЏЄƒ±дЋЃЅчЋўґ»їт’яЄƒ±дЋЃЅчЋўґ»“‘Љ∞Јљѕт£ђ—ЎќџЋЃЅчґѓЈљѕтєэ¬Ћ∞еµƒєэ¬Ћњ„Њґ“јіќљµµЌ£ђњњљьЋщ ц‘§і¶јн≥Ў≥цњЏі¶µƒєэ¬Ћ∞е÷–єэ¬Ћњ„µƒ÷±Њґ–°”Џ0.2cm°£
°°°°љш“ї≤љµЎ£ђЋщ цїм“Ї≥ЎƒЏЋжїъќї÷√…и÷√”–ґаЄціЂЄ–∆ч„й£ђ√њЄціЂЄ–∆ч„йЊщ∞ьј®PHЉм≤в∆чЇЌ„«ґ»Љм≤в∆ч£ђЋщ цїм“Ї≥Ўµƒ÷––ƒ…и÷√”–“ЇќїіЂЄ–∆ч£ђіЂЄ–∆ч„й“‘Љ∞Ћщ ц“ЇќїіЂЄ–∆чЊщ №њЎ”ЏЋщ ц„№њЎ÷∆∆ч°£
°°°°љш“ї≤љµЎ£ђЋщ ц“ЇќїіЂЄ–∆ч”√”Џ≤вЅњЋщ цїм“Ї≥Ў÷–µƒ“Їќї£ђµ±“Їќїµљіп‘§…и÷µµЂ «≤ҐќіµљіпЈвґ•÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤Љ эЊЁ≤…Љѓ÷ЄЅо£ђµ±“ЇќїµљіпЈвґ•÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤ЉЊѓ±®÷ЄЅо£ђµ±“ЇќїµљіпЈвµ„÷µ ±£ђѕт„№њЎ÷∆∆чЈҐ≤ЉЊѓ±®љв≥э÷ЄЅо;Ћщ ц„№њЎ÷∆∆чѕм”¶”ЏЋщ ц эЊЁ≤…Љѓ÷ЄЅо£ђ«эґѓіЂЄ–∆ч„йљш–– эЊЁ≤…Љѓ£ђѕм”¶”ЏЋщ цЊѓ±®÷ЄЅо£ђЋщ ц„№њЎ÷∆∆чњЎ÷∆Ћщ цќџЋЃЅчЌ®њ™єЎєЎ±’£ђѕм”¶”ЏЋщ цЊѓ±®љв≥э÷ЄЅо£ђЋщ ц„№њЎ÷∆∆чњЎ÷∆Ћщ цќџЋЃЅчЌ®њ™єЎњ™∆ф°£
°°°°љш“ї≤љµЎ£ђѕм”¶”ЏЋщ ц эЊЁ≤…Љѓ÷ЄЅо£ђЄч„й„«ґ»Љм≤в∆ч≤…Љѓp„й эЊЁ£ђЄч„йPHЉм≤вїъ≤…Љѓ“їіќ эЊЁ≤Ґїг„№µљ„№њЎ÷∆∆ч£ђ”…Ћщ ц„№њЎ÷∆∆чљш–– эЊЁі¶јнЇу£ђ“јЊЁ эЊЁі¶јнљбєыњЎ÷∆ќџЋЃЅчЌ®њ™єЎµƒњ™±’;Ћщ ц эЊЁі¶јн∞ьј®PH÷µі¶јнЇЌ„«ґ»÷µі¶јнЅљ≤њЈ÷ƒЏ»Ё°£
°°°°љш“ї≤љµЎ£ђ„«ґ»÷µі¶јнљбєы≤ї–°”Џ‘§…и„«ґ»÷µµЌѕё≤Ґ«“PH÷µµƒ эЊЁі¶јнљбєы‘Џ‘§…иPHг–÷µ«шЉд£ђ‘тќџЋЃЅчЌ®њ™єЎ≥ њ™∆ф„іћђ£ђ≤Ґ«“µЏЋƒњЎ÷∆ЈІЇЌµЏќењЎ÷∆ЈІ≥ єЎ±’„іћђ;Јс‘т£ђєЎ±’ќџЋЃЅчЌ®њ™єЎ;
°°°°»фЋщ ц„«ґ»÷µі¶јнљбєы–°”Џ‘§…и„«ґ»µЌ÷µ£ђњЎ÷∆Ћщ цћнЉ”ЉЅЌґ÷јїъ∆ч»ЋѕтЋщ цїм“Ї≥ЎЌґ÷ј“їіќ‘§…иЉЅЅњµƒґѓћђƒ§…ъ≥…ЉЅ;
°°°°»фЋщ цPH÷µµƒ эЊЁі¶јнљбєы–°”ЏЋщ цPHг–÷µ«шЉдµƒµЌ÷µ£ђњ™∆фµЏќењЎ÷∆ЈІ£ђ»фЋщ цPH÷µµƒ эЊЁі¶јнљбєыЄя”ЏЋщ цPHг–÷µ«шЉдµƒЄя÷µ£ђ‘тњ™∆фµЏЋƒњЎ÷∆ЈІ°£
°°°°±ЊЈҐ√чµƒ”–“ж–Ієы «£Ї
°°°°±ЊЈҐ√чєЂњ™ЅЋ“ї÷÷”√”Џљш––ќџЋЃі¶јнµƒїЈ±£…и±Є£ђ∆д∞ьј®ґаЄцЋЃі¶јн≥Ў£ђ≤Ґґјіі–‘µƒ…иЉ∆ЅЋ”√”ЏЌґЈ≈ћнЉ”ЉЅµƒЌґ÷јїъ∆ч»Ћ£ђ“‘Љ∞”√”Џ„Љ»Ј∆јєјЋЃµƒpH÷µ“‘Љ∞„«ґ»÷µµƒ эЊЁі¶јнЋгЈ®£ђ“‘Љ∞ґ‘ЄчЄцњ™єЎ“‘Љ∞µчљЏЈІµƒњЎ÷∆ЋгЈ®°£Ќ®єэ…ѕ цґјіі–‘…иЉ∆ єµ√±Њ…к«л÷–µƒїЈ±£…и±ЄЊя±Єѕ¬ ц”≈ ∆£Ї„‘ґѓїѓ≥ћґ»Єя£ђƒ№єї µѕ÷»Ђ„‘ґѓі¶јн;¬≥∞ф–‘«њ£ђƒ№єї∆Ѕ±ќЄч÷÷њ…ƒ№µЉ÷¬∆јєјќу≤оµƒ“тЋЎ£ђі”ґш єµ√ґ‘”ЏќџЋЃPH÷µЇЌ„«ґ»÷µµƒ∆јєјљбєы„гєї„Љ»Ј£ђ“тіЋ£ђњЎ÷∆ЊЂґ»Єя°£





